Как управление бесколлекторным двигателем
Содержание:
- Звезда и Треугольник
- Преимущества бесколлекторного двигателя
- Виды устройства
- Минусы коллекторных моторов
- Описание коллекторного двигателя
- Магниты и полюса
- Коллекторные двигатели разной мощности
- Виды электродвигателей и их особенности
- Выбор частоты ШИМ
- Принцип работы
- Однофазный электродвигатель: устройство и принцип работы
- Как запустить бесколлекторный двигатель?
- Устройство и принцип действия
- Как устроен бесщеточный двигатель
- Основные характеристики двигателя
- Возможно, вам также будет интересно
- Применение
- Заключение
- Заключение
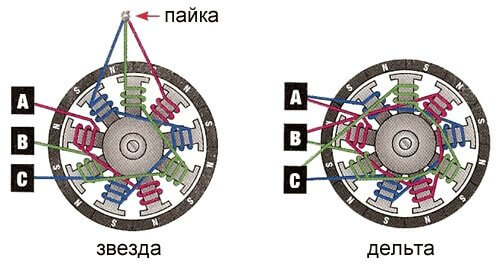
Звезда и Треугольник
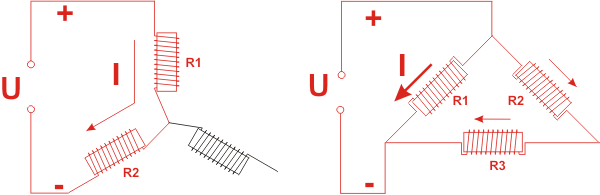
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
Виды устройства
Вентильные двигатели могут работать от переменного или постоянного тока. Помимо этого, их принято делить на следующие виды:
- Однофазное устройство. Это простейшие вентильные двигатели с наименьшим количеством связей между машиной и электроникой. К числу недостатков однофазных устройств следует отнести: пульсации, высокий крутящий момент, а также невозможность запуска на всех угловых положениях. Однофазные двигатели нашли широкое применение в машинах, где требуется высокая скорость.
- Двухфазный двигатель. Этот мотор при работе активизирует воздушный зазор либо, при дополнительной настройке, создает асимметрию в полюсах ротора. Это устройство устанавливается в машинах, где критична связь статора с обмоткой. К числу недостатков следует отнести высокий крутящий момент и пульсации, которые могут привести к пагубным последствиям.
- Трехфазный двигатель. Этот дисковый двигатель используется для запуска и создания крутящего момента, не используя при этом большого количества фаз. Данный тип двигателей используется в различных отраслях производства, а иногда и в бытовых условиях. Это самая популярная конструкция из всех представленных. Альтернативные 3-фазные машины с четным числом полюсов являются лучшим решением для приборов, где необходимо сочетание высокой мощности и низкой скорости, например, в насосах. Недостатки трехфазных двигателей: высокий крутящий моментом и повышенный уровень шума.
- Устройства с четырьмя фазами. У этих двигателей существенно снижен крутящий момент и пульсации, но сфера применения устройств ограничена высокой стоимостью и большой мощностью.
К сожалению, разработать и создать своими руками рабочий погружной или многофазный вентильный двигатель практически невозможно, намного проще купить нужную модель. В разных городах России и Украины цена вентильных двигателей может значительно варьироваться. Нижняя ступень будет около 8000 тысяч рублей, верхняя может достигать 20 000, в зависимости от области действия и производителя
Во многих сферах производства используются вентильные двигатели, в частности, на нефтяных скважинах, буровых установках, приводобежных механизмах, системах охлаждения воздуха на химических предприятиях.
Минусы коллекторных моторов
Сами по себе коллекторные моторы неплохо справляются со своей работой, но это лишь до того момента пока не возникает необходимость получить от них на выходе максимально высокие обороты. Все дело в тех самых щетках, о которых упоминалось выше. Так как они всегда находятся в плотном контакте с коллектором, то в результате высоких оборотов в месте их соприкосновения возникает трение, которое в дальнейшем вызовет скорый износ обоих и в последствии приведёт к потере эффективной мощности эл. двигателя. Это самый весомый минус таких моторов, который сводит на нет все его положительные качества.
Описание коллекторного двигателя
Прежде, перед рассмотрением вариантов установок, проясним, что значит понятие коллекторный двигатель. Электрический мотор, это устройство, преобразующее электрику в механику и наоборот. Если обмотка мотора имеет связующее звено с узлом коллектора и принимает участие в трансформации энергии, то такой агрегат носит название коллекторный.
Якоби Б.С. (1801-1874гг) изобретатель первого коллекторного двигателя в 1837г.
Элементы электрического двигателя:
- Ротор, деталь мотора, подвержена вращению;
- Статор, деталь мотора, остаётся в стационарном положении;
- Индуктор, кусок агрегата, который с целью сформировать момент, участвует в образовании потока магнитного поля. В состав индуктора входят: магниты, совокупность витков. Механизм выполняется в качестве части ротора или неподвижной детали;
- Якорь, агрегат, поддерживающий движение нагрузочного, упорядоченного движения частиц, носителей электрического заряда и за счет индукции, формирующий электродвижущую силу. Функцию якоря выполняет либо ротор, либо статор;
- Щетки, деталь, являющаяся частью электрической цепи, посредством которой ток передаётся к якорю. Материал, из которого делают щётки, как правило, графит. Двигатель содержит минимум две щётки для «положительного» и «отрицательного» полюсов;
- Коллектор, часть агрегата, контактирующая со щетками и распределяющая ток.
Название агрегата произошло благодаря наименованию узла ротора электродвигателя – коллектора. Визуально коллектор представляет собой деталь, в виде цилиндра, которая состоит из пластин меди, изолированных между собой.
Универсальный коллекторный двигатель.

Магниты и полюса
Количество полюсов на роторе четное. Форма применяемых магнитов обычно прямоугольная. Цилиндрические магниты применяются реже. Устанавливаются они с чередованием полюсов.
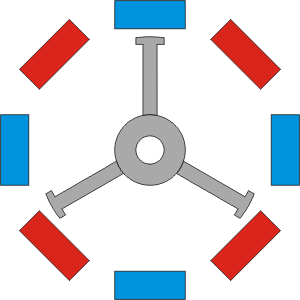
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
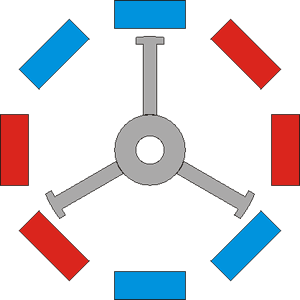
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Коллекторные двигатели разной мощности
Коллекторные двигатели можно условно разделить на две подгруппы, с меньшими и с большими мощностными показателями. Маломощные модели отличаются наличием физического магнита, закрепленного на корпусе. Второй магнит при этом создается с помощью коллекторно-щеточного узла, когда на якорную обмотку подается напряжение.
Вращающий момент возникает в результате непрерывной смены полюсов якорного магнита (при прохождении якоря через «магнитную нейтраль»). Этот эффект достигается следующим образом:
- коллекторное кольцо посредством специальных пластин делится на сектора;
- к секторам последовательно подсоединяют концы обмоток якоря.
На более мощные движки физические магниты обычно не устанавливают, поскольку это сильно утяжеляло бы конструкцию. Чтобы создать постоянное магнитное поле, к шине питания (положительной или отрицательной) подключают стержни с обмотками, последовательным образом подсоединяя полюса одноименного типа.
Высокомощные коллекторные двигатели имеют некоторые конструктивные нюансы:
- количество установленных токосъемников (щеток) должно соответствовать количеству пар полюсов;
- в целях повышения эффективности работы мотора после запуска и смены нагрузки щеточный узел сдвигают на определенный угол относительно направления вращения.
Виды электродвигателей и их особенности
Экономичность и надежность оборудования напрямую зависят от электродвигателя, поэтому его выбор требует серьезного подхода.
Посредством электродвигателя электрическая энергия преобразуется в механическую. Мощность, количество оборотов в минуту, напряжение и тип питания являются основными показателями электродвигателей. Также, большое значение имеют массогабаритные и энергетические показатели.
Электродвигатели обладают большими преимуществами. Так, по сравнению с тепловыми двигателями сопоставимой мощности, по размеру электрические двигатели намного компактнее. Они прекрасно подходят для установки на небольших площадках, например в оборудовании трамваев, электровозов и на станках различного назначения.
При их использовании не выделяется пар и продукты распада, что обеспечивает экологическую чистоту. Электродвигатели делятся на двигатели постоянного и переменного тока, шаговые электродвигатели, серводвигатели и линейные.
Электродвигатели переменного тока, в свою очередь, подразделяются на синхронные и асинхронные.
- Электродвигатели постоянного токаИспользуются для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями. К таким показателям относятся высокая равномерность вращения и перезагрузочная способность. Их используют для комплектации бумагоделательных, красильно-отделочных и подъемно-транспортных машин, для полимерного оборудования, буровых станков и вспомогательных агрегатов экскаваторов. Часто они применяются для оснащения всех видов электротранспорта.
- Электродвигатели переменного токаПользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
- Шаговые электродвигателиДействуют по принципу преобразования электрических импульсов в механическое перемещение дискретного характера. Большинство офисной и компьютерной техники оборудовано ими. Такие двигатели очень малы, но высокопродуктивны. Иногда и востребованы в отдельных отраслях промышленности.
- СерводвигателиОтносятся к двигателям постоянного тока. Они высокотехнологичны. Их работа осуществляется посредством использования отрицательной обратной связи. Такой двигатель отличается особой мощностью и способен развивать высокую скорость вращения вала, регулировка которого осуществляется с помощью компьютерного обеспечения. Такая функция делает его востребованным при оборудовании поточных линий и в современных промышленных станках.
- Линейные электродвигателиОбладают уникальной способностью прямолинейного перемещения ротора и статора относительно друг друга. Такие двигатели незаменимы для работы механизмов, действие которых основано на поступательном и возвратно-поступательном движении рабочих органов. Использование линейного электродвигателя способно повысить надежность и экономичность механизма благодаря тому, что значительно упрощает его деятельность и почти полностью исключает механическую передачу.
- Синхронные двигателиЯвляются разновидностью электродвигателей переменного тока. Частота вращения их ротора равняется частоте вращения магнитного поля в воздушном зазоре. Их используют для компрессоров, крупных вентиляторов, насосов и генераторов постоянного тока, так как они работают с постоянной скоростью.
- Асинхронные двигателиТакже, относятся к категории электродвигателей переменного тока. Частота вращения их ротора отличается от частоты вращения магнитного поля, которое создается током обмотки статора. Асинхронные двигатели разделяются на два типа, в зависимости от конструкции ротора: с короткозамкнутым ротором и фазным ротором. Конструкция статора в обоих видах одинакова, различие только в обмотке.
Электродвигатели незаменимы в современном мире. Благодаря им значительно облегчается работа людей. Их использование помогает снизить затрату человеческих сил и сделать повседневную жизнь намного комфортнее.
Выбор частоты ШИМ
Предположим ситуацию, когда, частота ШИМ 8 кГц, скважность 100% (полный газ), двигатель вращается со скоростью, при которой частота коммутаций тоже равняется 8 кГц. Т.е
от момента переключения ключей до следующего переключения проходит ровно один период ШИМ сигнала. Если скорость вращения возрастёт и частота коммутаций превысит частоту ШИМ, возникнет ситуация, при которой ШИМ сигнал будет удерживать ключи открытыми дольше необходимого и противодействовать вращению двигателя. Кроме того, измерение напряжения на свободной фазе синхронизированы частотой ШИМ сигнала, поэтому нет технической возможности вычислить скорость коммутации выше частоты ШИМ. Другими словами контролер теоретически не сможет управлять двигателем, если тот вращается со скоростью, при которой частота коммутаций превышает частоту ШИМ сигнала. Это только теоретические расчеты. На практике, желательно чтобы частота ШИМ в несколько раз превышала частоту коммутаций.
Например, имеем регулятор с частотой ШИМ 8 кГц, и двигатель с 14 магнитами.
Максимальная теоретически возможная частота вращения вала двигателя будет:
V=(Q/6/(N/2)*60);
Q — частота ШИМ в герцах
6 — количество коммутаций за один электрический оборот
N — количество магнитов
60 — количество секунд в минуте
V=((8000/6/(14/2))*60) = 11428 об/мин.
Двигатель с 28 магнитами:
V=((8000/6/(28/2))*60) = 5714 об/мин.
Т.е. если вам нужно управлять многополюсным двигателем на высоких оборотах, придется использовать регулятор с более высокой частотой ШИМ.
Например, чтобы раскрутить двигатель с 24 магнитами до 10000 об/мин понадобится регулятор с частотой ШИМ не ниже 24кГц. Нужно так же помнить, что чем выше частота ШИМ, тем больше переходных процессов происходит на ключах за единицу времени. Это может привести к увеличению потерь и к увеличению тепловыделения на ключах.
Статьи по бесколлекторным моторам:
- Что такое Бесколлекторный мотор?
- Устройство бесколлекторного мотора
- Как управлять бесколлекторным мотором с датчиками Холла (Sensored brushless motors)
- Как управлять бесколлекторным мотором без датчиков (Sensorless BLDC)
- Запуск бездатчикового бесколлекторного мотора (Sensorless BLDC)
- Определение положения ротора бесколлекторника в остановленном состоянии
- Контроллер бесколлекторного мотора. Структура ESC
- Схема контроллера бесколлекторного мотора (ESC)
- Силовая часть контроллера бесколлекторного мотора
- Литература по бесколлекторнм моторам
- Примеры на С для управления бесколлекторными моторами
- Схема контроллера бесколлекторного мотора BLDC, PMSM на микроконтроллере STM32
- STM32. Управление бесколлекторным мотором (BLDC)
- STM32. Пример регулятора для бесколлекторного PMSM
- Видео о бесколлекторных моторах. BLDC, PMSM, векторное управление
Принцип работы
Вентильный бесколлекторный двигатель ВМЭД, ДВУ является одним из видов электрического двигателя, который индуцирует непостоянные магнитные полюса на ферромагнитном роторе. Крутящий момент создается за счет магнитного сопротивления.
Фото – Бесколлекторный вентильный двигатель
Вентильные двигатели бывают трех типов:
- Синхронный;
- Асинхронный;
- Индукторный.
Конструкция вентильно-реактивного двигателя (ВРД) включает в себя две фазные обмотки, установленные вокруг диаметрально противоположных полюсов статора. При подаче питания ротор движется в соответствии с полюсами статора, благодаря чему, сопротивление магнитного поля сводится к минимуму. В основе работы вентильно индукторного двигателя используется тот же принцип.
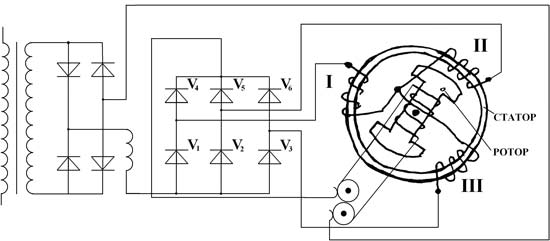
Фото – Вентильный двигатель
В высокоэффективной переменной скорости привода магнетизм двигателя оптимизирован для работы с реверсом. Информация о положении ротора используется для управления фазы подачи напряжения. Благодаря этому обеспечивается непрерывный крутящий момент и высокая эффективность. Сигналы накладываются на угловую ненасыщенную фазу индуктивности, при этом ее максимальная величина соответствует минимальному сопротивлению полюса. Положительный момент производится только при углах, когда индуктивность градиента также является положительной.
Для защиты электроники от высоких вольт-секунд фазный ток на низких скоростях необходимо ограничивать. Как правило, это достигается за счет гистерезиса тока. Для контроля процесса используются специальные датчики.
Фото – Схема вентильного двигателя
На более высоких скоростях ток ограничен. Чтобы оптимизировать производительность, управляющее напряжение одиночного импульса используют с заранее выровненным углом.
Траектория реактивной энергии наглядно иллюстрирует механизм ее преобразования. Мощностная область представляет собой питание, которое преобразуется в механическую энергию (или она уже была преобразована генератором). При резком отключении питания остаточная или избыточная энергия возвращается к статору. Минимальное влияние магнитного поля на работу двигателя является его основным отличием от аналогичных устройств.
Преимущества вентильного двигателя:
- Благодаря небольшому магнитному сопротивлению минимизируются потери энергии;
- Высокие показатели безопасности (возможность работы при пиковых нагрузках);
- Широкий диапазон скоростей;
- Мягкое переключение скоростей.
К числу недостатков автоматизированных вентильных электродвигателей можно причислить:
- Высокий уровень шума;
- Сложно управление;
- Относительно высокая стоимость, по сравнению с аналогичными устройствами.
Видео: из чего состоят вентильные двигатели
https://youtube.com/watch?v=fSt8Gcpj3zA
Однофазный электродвигатель: устройство и принцип работы
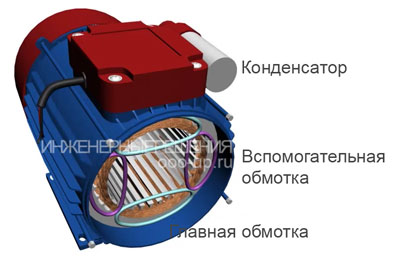
Использующий после пуска только одну обмотку статора (фазу) и не нуждающийся в частном преобразователе электродвигатель, работающий от электросети однофазного переменного тока, является асинхронным или однофазовым.
Однофазовый электродвигатель имеет вращающуюся часть – ротор и неподвижную – статор, который и создает магнитное поле, необходимое для вращения ротора.
Из двух, расположенных в сердечнике статора друг к другу под углом 90 градусов обмоток, рабочая занимает 2/3 пазов. Другая обмотка, на долю которой приходится 1/3 пазов, называется пусковой (вспомогательной).
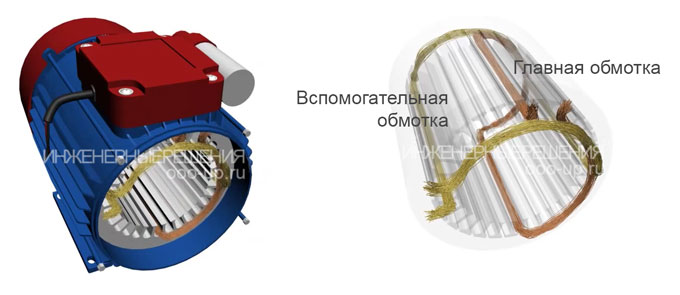
Ротор – это тоже короткозамкнутая обмотка. Его стержни из алюминия или меди замкнуты с торцов кольцом, а пространство между ними залито алюминиевым сплавом. Может быть выполнен ротор в виде полого ферромагнитного или немагнитного цилиндра.
Однофазный электродвигатель, мощность которого может быть от десятков ватт до десятка киловатт, применяются в бытовых приборах, устанавливаются в деревообрабатывающих станках, на транспортерах, в компрессорах и насосах. Преимущество их – возможность использования в помещениях, где нет трехфазной сети. По конструкции они не сильно отличаются от электродвигателей асинхронных трехфазного тока.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
Максимальная величина штатного напряжения для продолжительной работы.
Сопротивление внутренних цепей контроллера.
Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне)
Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество
Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД
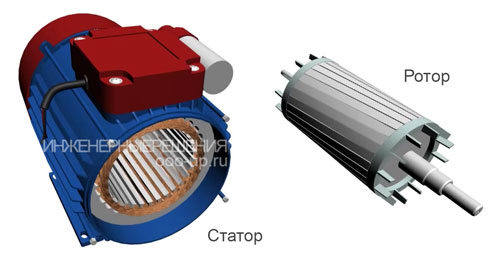
Устройство и принцип действия
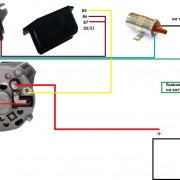
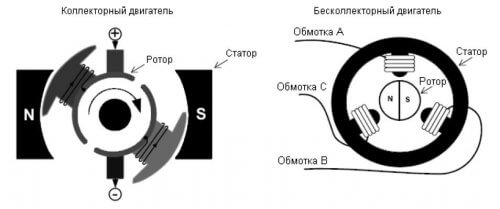
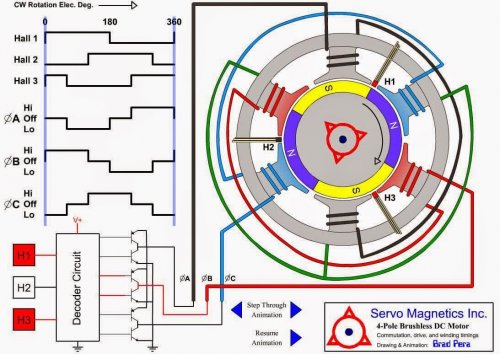
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
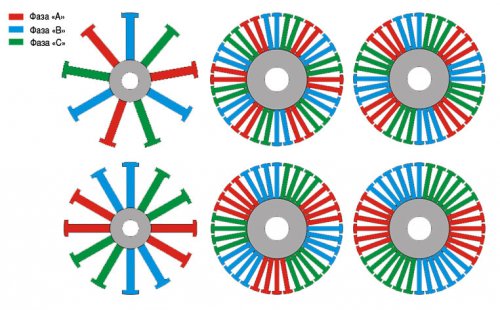
Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
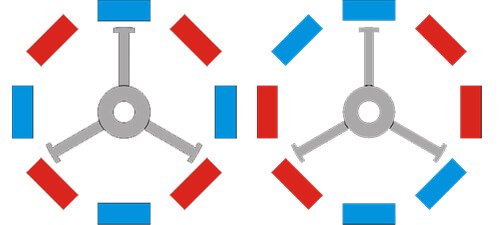
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Как устроен бесщеточный двигатель
Работа бесщеточного электродвигателя основывается на электрических приводах, создающих магнитное вращающееся поле.
В настоящее время существует несколько типов устройств, имеющих различные характеристики.
С развитием технологий и использованием новых материалов, отличающихся высокой коэрцитивной силой и достаточным уровнем магнитного насыщения, стало возможным получение сильного магнитного поля и, как следствие, вентильных конструкций нового вида, в которых отсутствует обмотка на роторных элементах или стартере.
Обширное распространение переключателей полупроводникового типа с высокой мощностью и приемлемой стоимостью ускорило создание подобных конструкций, облегчило исполнение и избавило от множества сложностей с коммутацией.
Основные характеристики двигателя
- Режим работы на который рассчитан двигатель: длительный или кратковременный. Длительный режим работы подразумевает, что двигатель может работать часами. Такие двигатели рассчитываются таким образом, чтобы теплоотдача в окружающую среду была выше тепловыделения самого двигателя. В этом случае он не будет разогреваться. Пример: вентиляция, привод эскалатора или конвейера. Кратковременный — подразумевает, что двигатель будет включаться на короткий период, за который не успеет разогреться до максимальной температуры, после чего следует длительный период, за время которого двигатель успевает остыть. Пример: привод лифта, электробритвы, фены.
- Сопротивление обмотки двигателя. Сопротивление обмотки двигателя влияет на КПД двигателя. Чем меньше сопротивление, тем выше КПД. Измерив сопротивление, можно выяснить наличие межвиткового замыкания в обмотке. Сопротивление обмотки двигателя составляет тысячные доли Ома. Для его измерения требуется специальный прибор или специальная методика измерения.
- Максимальное рабочее напряжение. Максимальное напряжение, которое способна выдержать обмотка статора. Максимальное напряжение взаимосвязано со следующим параметром.
- Максимальные обороты. Иногда указывают не максимальные обороты, а Kv — количество оборотов двигателя на один вольт без нагрузки на валу. Умножив этот показатель на максимальное напряжение, получим максимальные обороты двигателя без нагрузки на валу.
- Максимальный ток. Максимально допустимый ток обмотки. Как правило, указывается и время, в течение которого двигатель может выдержать указанный ток. Ограничение максимального тока связано с возможным перегревом обмотки. Поэтому при низких температурах окружающей среды реальное время работы с максимальным током будет больше, а в жару двигатель сгорит раньше.
- Максимальная мощность двигателя. Напрямую связана с предыдущим параметром. Это пиковая мощность, которую двигатель может развить на небольшой период времени, обычно — несколько секунд. При длительной работе на максимальной мощности неизбежен перегрев двигателя и выход его из строя.
- Номинальная мощность. Мощность, которую двигатель может развивать на протяжении всего времени включения.
- Угол опережения фазы (timing). Обмотка статора имеет некоторую индуктивность, которая затормаживает рост тока в обмотке. Ток достигнет максимума через некоторое время. Для того, чтобы компенсировать эту задержку переключение фаз выполняют с некоторым опережением. Аналогично зажиганию в двигателе внутреннего сгорания, где выставляется угол опережения зажигания с учетом времени воспламенения топлива.
Kv
Возможно, вам также будет интересно
Валентин Володин Порошковые сердечники состоят из мелких зерен ферромагнитного материала на основе железа или никеля, скрепленных между собой с помощью специального связующего диэлектрика, обеспечивающего электрическую изоляцию между отдельными зернами. По этой причине подобные магнитные материалы еще называют магнитодиэлектриками. Немагнитные промежутки между отдельными зернами в сумме формируют значительный распределенный немагнитный зазор, уменьшающий магнитную проницаемость сердечника. В
Алексей Мальцев Иван Мальцев Известно, что общая надежность радиоэлектронной аппаратуры в значительной степени зависит от надежности силовых компонентов, например выпрямительных мостов в источниках питания. Разработчики постоянно оказываются перед необходимостью выбора как самих силовых компонентов, так и режимов работы, особенно коэффициента нагрузки по мощности. Уменьшение этого коэффициента автоматически повышает надежность работы силового компонента, но одновременно увеличивает
Замок с оповещением по email: конкурент gsm-сигнализации
Применение
Области применения БДТП следующие:
- создание моделей;
- медицина;
- автомобилестроение;
- нефтегазовая промышленность;
- бытовые приборы;
- военная техника.
 Использование БД для авиамоделей дает значительное преимущество по мощности и габаритам. Сравнение обычного коллекторного двигателя типа Speed-400 и БДТП того же класса Astro Flight 020 показывает, что двигатель первого типа имеет кпд 40-60%. Кпд второго двигателя в тех же условиях может достигать 95%. Таким образом, использование БД позволяет увеличить почти в 2 раза мощность силовой части модели или время ее полета.
Использование БД для авиамоделей дает значительное преимущество по мощности и габаритам. Сравнение обычного коллекторного двигателя типа Speed-400 и БДТП того же класса Astro Flight 020 показывает, что двигатель первого типа имеет кпд 40-60%. Кпд второго двигателя в тех же условиях может достигать 95%. Таким образом, использование БД позволяет увеличить почти в 2 раза мощность силовой части модели или время ее полета.
Благодаря малому шуму и отсутствию нагревания при работе БДПТ широко используются в медицине, особенно в стоматологии.
В автомобилях такие двигатели используются в подъемниках стекол, электростеклоочистителях, омывателях фар и электрорегуляторах подъема кресел.
Отсутствие коллектора и искрения щеток позволяет использовать БД в качестве элементов запорных устройств в нефтегазовой промышленности.
В качестве примера использования БД в бытовой технике можно отметить стиральную машину с прямым приводом барабана компании LG. Эта компания использует БДТП типа Outrunner. На роторе двигателя имеется 12 магнитов, а на статоре – 36 катушек индуктивности, которые намотаны проводом диаметром в 1 мм на сердечники из магнитопроводящей стали. Катушки соединены последовательно по 12 штук в фазе. Сопротивление каждой фазы равно 12 Ом. В качестве датчика положения ротора используется датчик Холла. Ротор двигателя крепится к баку стиральной машины.
 Повсеместно данный двигатель используется в жестких дисках для компьютеров, что делает их компактными, в CD и DVD приводах и системах охлаждения для микро-электронотехнических устройств и не только.
Повсеместно данный двигатель используется в жестких дисках для компьютеров, что делает их компактными, в CD и DVD приводах и системах охлаждения для микро-электронотехнических устройств и не только.
Наряду с БД малой и средней мощности в промышленности с тяжелыми условиями работы, судовой и военной промышленностях все больше используются большие БДПТ.
БД большой мощности разработаны для американских ВМС. Например, компания Powertec разработала БДТП мощностью 220 кВт со скоростью в 2000 об/мин. Момент двигателя достигает 1080 Нм.
Кроме указанных областей, БД применяются в проектах станков, прессов, линий для обработки пластмасс, а также в ветроэнергетике и использовании энергии приливных волн.
Заключение
Итак, подведем итоги и обозначим в чем разница между коллекторным и бесколлекторным двигателем, перечислив их особенности.
- Есть щетки и коллектор, которые искрят и изнашиваются.
- Нужно чаще обслуживать, соответственно и срок службы не слишком долгий.
- Легко регулировать скорость лишь изменением напряжения.
- Для реверса нужно просто сменить полярность.
- Два предыдущих факта позволяют их использовать в бюджетных устройствах без сложных электросхем.
Для запуска нужен контроллер, который хоть и не слишком дорого стоит, но увеличивает конечную стоимость, схемотехнику и вес изделия. Весят меньше чем коллекторные, при одинаковой мощности (но это частично компенсируется предыдущим фактом). Нет щеток и коллектора, поэтому не требуют обслуживания, не искрят. Больший срок службы, он ограничен лишь ресурсом подшипников ротора. Стоят обычно дороже чем коллекторные. Зачастую выдают больший момент на валу и обороты. При наличии датчиков положения вала обеспечивают большую стабильность оборотов при изменении нагрузки (жесткая механическая характеристика)
Это особенно важно при использовании на станках и ручном инструменте
Добавлю то, что нельзя однозначно сказать какой лучше или какой мощнее, можно найти коллекторный двигатель размером с холодильник, а можно бесколлекторный размером с ноготь. При этом оба будут отлично выполнять те функции, на которые рассчитаны и использоваться в конкретных устройствах с учетом требований к их надежности и особенностям эксплуатации. Каждый вид электропривода хорош по своему и идеален по конструкции как таковой.
Теперь вы знаете, в чем разница между коллекторным и бесколлекоторным двигателем, а также какие плюсы и минусы у каждого варианта исполнения. Надеемся, предоставленная информация была для вас полезной и интересной!
Источник
Заключение
Многовариантное моделирование вентильного электропривода показало достаточную адекватность всех рассмотренных вариантов представления БДПТ. При представлении потокосцепления и тока БДПТ первой гармоникой, а также при замене эквивалентным МДПТ удается получить замкнутые выражения для переходных и установившихся процессов в БДПТ и на этой базе исследовать электромеханические процессы и осуществить предварительный структурный и параметрический синтез электропривода. Однако «чистовая доводка» спроектированного электропривода должна осуществляться с использованием строгой модели БДПТ в фазовых координатах.