Описание can шины и как через нее подключить автосигнализацию
Содержание:
- Промышленные применения сети CAN
- Режимы работы
- Мобильное приложение VAG Virtual Cockpit
- Как передается информация
- Что такое CAN-шина и принцип ее работы
- 1 О принципе работы сетевого интерфейса CAN-шина
- Что такое CAN-шина
- Передача сигналов
- Реализации протокола CAN
- Необходимость последовательного соединения в автомобилях
Промышленные применения сети CAN
Сравнение требований к шинным системам транспортных средств и системам промышленных полевых шин показывает удивительные сходства: низкая стоимость, работоспособность в жесткой электрической среде, высокие возможности в реальном времени и простота использования одинаково желательны в обоих секторах.
Стандартное использование CAN в «S-классе» Mercedes-Benz и принятие CAN коммерческими автопроизводителями США для быстрой передачи (до 1 Мбит / с) заставляли промышленных пользователей навострить уши. Не только производители мобильных и стационарных сельскохозяйственных и морских машин и оборудования выбрали CAN, но и выбор производителей медицинской аппаратуры, текстильных машин, а также специальной техники и элементов управления лифтами. Система последовательной шины особенно хорошо подходит для сетевых «интеллектуальных» устройств ввода-вывода, а также датчиков и исполнительных механизмов внутри машины или завода.
Промышленность текстильного машиностроения является одним из пионеров CAN. Один производитель оснастил свои ткацкие станки модульными системами управления, сообщающимися в режиме реального времени через сети CAN еще в 1990 году. Тем временем несколько производителей текстильных машин объединились в группу «CAN Textile Users Group», которая, в свою очередь, является членом международной группы пользователей и производителей «CAN in Automation». Аналогичные требования к текстильному оборудованию имеются в упаковочных машинах и машинах для производства и обработки бумаги.
В США ряд предприятий используют CAN в производственных линиях и станках в качестве внутренней системы шин для сетевых датчиков и исполнительных механизмов внутри линии или непосредственно машины. Некоторые пользователи, такие как сектор медицинской инженерии, решили в пользу CAN, поскольку у них были особенно строгие требования безопасности. С аналогичными проблемами сталкиваются и другие производители машин и оборудования с особыми требованиями в отношении безопасности (например, роботы и транспортные системы).
Помимо высокой надежности передачи, низкие затраты на соединение на станцию являются еще одним решающим аргументом для CAN
В приложениях, где цена имеет решающее значение, очень важно, чтобы чипы CAN были доступны от различных производителей. Компактность других чипов контроллера также является важным аргументом, например, в области низковольтных распределительных устройств.
Режимы работы
Существует несколько режимов функционирования терминала:
- FMS — в нем автовладелец может узнать общий расход горючего, обороты, пробег транспортного средства, нагрузку на оси, температуру силового агрегата. Допускается получение данные об объеме горючего в баке. Для работы в данном режиме выполняется вход в меню выбора типа фильтров программы «Конфигуратор». Указывается тип режима FMS, скорость цифрового интерфейса, после чего нажимается кнопка «Применить».
- Режим прослушки используется для получения сообщений, передающий через цифровой интерфейс. Чтобы работать с ним, надо зайти в программе в настройки шины CAN и выбрать один из рабочих параметров. Это может быть скорость интерфейса или время ожидания, тип фильтра в данном случае не играет роли. После указания параметров «кликается» клавиша «Прослушать».
- Для привязки информации, полученной посредством прослушивания цифрового интерфейса, используются пользовательские фильтры. После прослушки данных надо выбрать тип фильтрующей технологии (для 11 или 29 бит). Расшифровка данных производится в соответствии с технической документацией.
- Режим тестирования OBD2 используется для сканирования скорости отправки информации, а также класса идентификатора. Чтобы запустить эту функцию, автовладельцу надо подключиться напрямую к цифровому интерфейсу или диагностическому разъему. Включение режима осуществляется посредством входа в меню «Настройка» и выбора опции «Тест OBD2». В результате терминалом начнется отправка запросов с конкретными идентификаторами на различных скоростях интерфейса. Во вкладке «Устройство» можно ознакомиться с извлеченной и расшифрованной информацией.
Мобильное приложение VAG Virtual Cockpit
Для разработки мобильного приложения подключаемого к автомобилю требовалось:
-
Сниффером собрать трафик от диагностической утилиты VCDS
-
Изучить работу протоколов UDS, VW TP 2.0, KWP2000
-
Настроить диагностический сканер ELM327 на работу с UDS и VW TP 2.0
-
Изучить новый для меня язык программирования Swift
Мобильное приложение VAG Virtual Cockpit для iOS
В итоге получилось приложение, которое сочетает в себе функции отображения точных данных панели приборов и диагностика основных параметров двигателя и трансмиссии.
Пару слов про точность данных. Штатная панель приборов не точно показывает скорость — завышает показания на 5-10 км/ч, стрелка охлаждающей жидкости всегда на 90 °C, хотя реальная температура может быть 80 — 110 °C, стрелка уровня топлива до середины идет медленно, хотя топлива уже меньше половины и при нуле на самом деле топливо еще есть в баке. Производитель это делает для удобства и безопасности водителя.
На данный момент приложение показывает следующие параметры:
|
Приборная панель |
Двигатель |
Трансмиссия (температура) |
|
1) Какая дверь открыта2) Скорость3) Обороты4) Температура масла5) Температура ОЖ6) Топливо в баке в л.7) Запас хода в км.8) Средний расход9) Время в машине10) Пробег11) Температура за бортом |
1) Обороты2) Массовый расход воздуха3) Температура забора воздуха4) Температура выхлопа (рассчитанная)5) Критический уровень масла6) Уровень масла7) Наддув турбины (реальный)8) Наддув турбины (ожидаемый)9) Пропуски зажигания в цилиндрах10) Углы откатов зажигания в цилиндрах |
1) ATF AISIN (G93)2) DSG6 (G93)3) Блок управления DSG6 (G510)4) Масло диска сцепления DSG6 (G509)5) Мехатроник DSG7 (G510)6) Процессор DSG77) Диск сцепления DSG7 |
Я стремлюсь чтобы приложение поддерживало как можно больше моделей автомобилей. Пока что поддерживаются производители: Volkswagen, Skoda, Seat, Audi. На разных комплектациях могут отображаться не все параметры, но это поправимо.
Сейчас я провожу тестирование версии 3.0. Приложение доступно только на iOS, после релиза 3.0 перейду к разработке версии для Android.
Как передается информация
Итак, CAN-шина представляет собой сеть, по которой происходит обмен информацией между устройствами. Возьмем для примера блок управления двигателем – он имеет не только основной микроконтроллер, но и CAN-устройство, которое формирует и рассылает импульсы по шинам H (CAN-высокий) и L (CAN-низкий), которые называются витая пара.
Сигналы рассылаются по витой паре трансивером или приемопередатчиком. Он нужен для целого ряда задач – усиления сигналов, защиты линии в случае повреждения CAN-шины, создания условий помехозащищенности передаваемых импульсов и регулировки скорости их передачи. В автомобильной промышленности применяются передатчики двух типов с говорящими названиями High Speed и Fault Tolerant. Первый обеспечивает передачу данных на высокой скорости, до 1 мегабита в секунду. Второй не столь быстрый и передает в секунду до 120 килобит в секунду, но при этом допускает отклонение от параметров CAN-шины и не столь чувствителен к ее качеству.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN.
Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов.
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.Для решения данной технической проблемы используется преобразователь для связи между шинами.Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Рис. 3. Блок-схема межсетевого интерфейса
Что такое CAN-шина и принцип ее работы
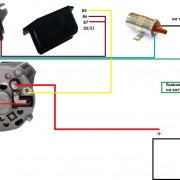
КАН-шина представляет собой сеть контроллеров. Устройство используется для объединения всех управляющих модулей автомобиля в одну рабочую сеть с общим проводом. Этот девайс состоит из одной пары кабелей, которая называется CAN. Информация, передающаяся по каналам из одного модуля на другой, отправляется в закодированном виде.
Схема подключения устройств к CAN-шине в Мерседесе
Какие функции может выполнять CAN-шина:
- подключение к автомобильной бортовой сети любых девайсов и устройств;
- упрощение алгоритма подсоединения и функционирования вспомогательных систем машины;
- блок может одновременно получать и передавать цифровые данные из разных источников;
- использование шины снижает воздействие внешних электромагнитных полей на функционирование основных и вспомогательных систем машины;
- CAN-шина позволяет ускорить процедуру передачи информации к определенным устройствам и узлам автомобиля.
Эта система работает в нескольких режимах:
- Фоновый. Все устройства отключены, но на шину подается питание. Величина напряжения слишком мала, поэтому разрядить аккумуляторную батарею шина не сможет.
- Режим запуска. Когда автолюбитель вставляет ключ в замок и проворачивает его либо жмет кнопку Старта, происходит активация устройства. Включается опция стабилизации питания, которое подается на контроллеры и датчики.
- Активный режим. В этом случае между всеми контроллерами и датчиками происходит обмен данными. При работе в активном режиме параметр потребления энергии может быть увеличен до 85 мА.
- Режим засыпания или отключения. При глушении силового агрегата контроллеры КАН перестают функционировать. При включении режима засыпания все узлы машины отключаются от бортовой сети.
Канал Виалон СУшка в своем видео рассказал о КАН-шине и что надо знать про ее эксплуатацию.
Плюсы и минусы
Какими преимуществами обладает КАН-шина:
- Простота установки устройства в автомобиль. Владельцу машины не придется тратиться на монтаж, поскольку выполнить эту задачу можно самостоятельно.
- Быстродействие устройства. Девайс позволяет быстро обмениваться информацией между системами.
- Устойчивость к воздействию помех.
- Все шины обладают многоуровневой системой контроля. Ее использование дает возможность предотвратить появление ошибок при передаче и приеме данных.
- В процессе функционирования шина автоматически разбрасывает скорость по разным каналам. Это позволяет обеспечить оптимальную работу всех систем.
- Высокая безопасность устройства, при надобности система блокирует несанкционированный доступ.
- Большой выбор устройств различных типов от разных производителей. Можно подобрать вариант, предназначенный для конкретной модели авто.
Какие недостатки характерны для устройства:
- В девайсах бывают ограничения по объему передаваемых данных. В современных автомобилях используется множество электронных девайсов. Их большое количество приводит к высокой загруженности канала передачи информации. Это становится причиной увеличения времени отклика.
- Большая часть отправляющихся по шине данных обладает конкретным назначением. На полезную информацию отводится маленькая часть трафика.
- При использовании протокола высшего уровня автовладелец может столкнуться с проблемой отсутствия стандартизации.
1 О принципе работы сетевого интерфейса CAN-шина
Кан-шина в автомобиле предназначена для обеспечения подключения любых электронных устройств, которые способны передавать и получать определенную информацию. Таким образом, данные о техническом состоянии систем и управляющие сигналы проходят по витой паре в цифровом формате. Такая схема позволила снизить негативное влияние внешних электромагнитных полей и существенно увеличить скорость передачи данных по протоколу (правила, по которым блоки управления различными системами способны обмениваться информацией).
Кроме того, диагностика ЭБУ различных систем автомобиля своими руками стала проще. За счет применения подобной системы в составе бортовой сети автомобиля высвободилось определенное количество проводников, которые способны обеспечивать связь по различным протоколам, например, между блоком управления двигателем и диагностическим оборудованием, системой сигнализации. Именно наличие Кан-шины в автомобиле позволяет владельцу своими руками выявлять неисправности контроллеров и ошибки с помощью специального диагностического оборудования.
 Кан-шина в автомобиле
Кан-шина в автомобиле
CAN-шина – это специальная сеть, с помощью которой осуществляется передача и обмен данными между различными узлами управления. Каждый из узлов состоит из микропроцессора (CPU) и CAN-контроллера, с помощью которого реализуется исполняемый протокол и обеспечивается взаимодействие с сетью автомобиля. Шина Кан имеет минимум две пары проводов – CAN_L и CAN_H, по которым и передаются сигналы посредством трансиверов – приемо-передатчиков, способных усиливать сигнал от управляющих устройств сети. Кроме того, трансиверы выполняют и такие функции как:
- регулировка скорости передачи данных посредством усиления или уменьшения подачи тока;
- ограничение тока для предотвращения повреждения датчика или замыкания линий передачи;
- тепловая защита.
На сегодняшний день признаны два вида трансиверов – High Speed и Fault Tolerant. Первый тип наиболее распространен и соответствует стандарту (ISO 11898-2), он позволяет передавать данные со скоростью до 1МБ в секунду. Второй тип приемопередатчиков позволяет создать энергосберегающую сеть, со скоростью передачи до 120 Кб/сек, при этом подобные передатчики не имеют чувствительности к каким-либо повреждениям на самой шине.
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
Передача сигналов
Физически проводник CAN-шины современного автомобиля выполнен из двух составляющих. Первый — черного цвета и называется CAN-High. Второй проводник, оранжево-коричневый, именуется CAN-Low. Благодаря представленной структуре коммуникаций из схемы автомобиля удалена масса проводников. При производстве транспортных средств это позволяет уменьшить вес изделия до 50 кг.

Общая сетевая нагрузка состоит из разрозненных сопротивлений блоков, которые входят в состав протокола, называемого КАН-шина.
Различны и скорости передачи-получения каждой системы. Поэтому обеспечивается обработка разнотипных сообщений. Согласно описанию шины-CAN, эту функцию выполняет преобразователь сигналов. Он называется межсетевым электронным интерфейсом.
Расположен этот прибор в конструкции управляющего блока, но бывает выполнен в виде обособленного прибора.
Представленный интерфейс применяют также для вывода и ввода сигналов диагностического характера. Для этого предусмотрено наличие унифицированной колодки OBD. Это особый разъем для диагностики системы.
Реализации протокола CAN
Связь идентична для всех реализаций протокола CAN. Однако существуют различия в отношении того, в какой степени реализация осуществляет передачу сообщений от микроконтроллеров, которые следуют за ней в схеме. Связь идентична для всех реализаций протокола CAN. Однако существуют различия в отношении того, в как реализуется передача сообщений от микроконтроллеров, которые следуют за ней в схеме.
CAN-контроллер с промежуточным буфером
Контроллеры CAN с промежуточным буфером (ранее называемые чипами basicCAN) реализовали в качестве аппаратного обеспечения логику, необходимую для создания и проверки потока битов согласно протоколу. Однако администрирование наборов данных, которые должны быть отправлены и получены, в частности, фильтрация приёма осуществляется только CAN-контроллером.
Как правило, CAN-контроллеры с промежуточным буфером имеют два приема и один буфер передачи. 8-разрядные регистры кода и маски допускают ограниченную фильтрацию принятия (8 MSB идентификатора). Подходящий выбор этих значений регистра позволяет считывать группы идентификаторов или, в пограничных случаях, выбирать все идентификаторы. Если для дифференцирования сообщений требуется более 8 ID-MSB, тогда микроконтроллер, следующий за CAN-контроллером в схеме, должен дополнять фильтрацию принятия программным обеспечением.
Контроллеры CAN с промежуточным буфером могут перенести большую нагрузку на микроконтроллер с фильтрацией приёма, но они требуют только небольшой площади кристалла и поэтому могут быть изготовлены с меньшими затратами. В принципе, они могут принимать все объекты в сети CAN.
CAN-контроллер с хранилищем объектов.
Объекты CAN состоят в основном из трех компонентов: идентификатора, кода длины данных и фактических полезных данных.
CAN-контроллеры с хранилищем объектов (ранее называемые fullCAN) функционируют как CAN-контроллеры с промежуточными буферами, но также управляют определенными объектами. Там, где есть несколько одновременных запросов, они определяют, например, какой объект должен быть передан первым. Они также выполняют фильтрацию принятия для входящих объектов. Интерфейс к следующему микроконтроллеру соответствует ОЗУ. Данные, подлежащие передаче, записываются в соответствующую область ОЗУ, полученные данные считываются из области ОЗУ, соответственно. Микроконтроллер должен управлять только несколькими битами (например, запросом передачи).
Контроллеры CAN с хранилищем объектов рассчитаны на максимальную нагрузку от локального микроконтроллера. Однако эти CAN-контроллеры требуют большей площади кристалла и, следовательно, более дороги. В дополнение к этому, они могут администрировать только ограниченное количество чипов(микроконтроллеров).
На сегодняшний день доступны контроллеры CAN, которые сочетают в себе оба принципа реализации. Они имеют хранилище объектов, по крайней мере одно из которых спроектировано как промежуточный буфер. По этой причине больше нет смысла дифференцировать basicCAN и fullCAN.
CAN подчиненные контроллеры для функций ввода / вывода.
Также как CAN-контроллеры, которые поддерживают все функции CAN-протокола, есть CAN-чипы, для которых не требуется следующий за ним микроконтроллер. Эти CAN-чипы называются SLIO (последовательное соединение ввода / вывода). CAN-чипы являются подчиненными и должны управляться CAN-мастером(центральный, основной микроконтроллер в сети).
Необходимость последовательного соединения в автомобилях
Это следующая наша переводная статья из цикла посвященного шине CAN, которая еще чуть более подробно раскрывает то, как устроена и функционирует шина КАН. Англоязычный оригинал.
Предыдущую читайте здесь.
Многие автомобили уже имеют большое количество электронных систем управления. Рост автомобильной электроники является результатом отчасти стремления потребителя к большей безопасности и комфорту, а также отчасти требований правительства по улучшению контроля за выбросами и снижению расхода топлива. Управляющие устройства, отвечающие этим требованиям уже используются в течение некоторого времени в области управления двигателем, коробкой передач и дроссельной заслонкой, а также в антиблокировочных системах (ABS) и системе управления ускорением (ASC) .
Сложность функций, реализованных в этих системах, требует обмена данными между ними. В традиционных системах обмен данными осуществляется с помощью выделенных сигнальных линий, но это становится все труднее и дороже, так как функции управления становятся все более сложными. В случае сложных систем управления (таких как Motronic), в частности, количество соединений не может больше увеличиваться.
Кроме того, разрабатывается ряд систем, реализующих функции, охватывающие более одного управляющего устройства. Например, ASC требует взаимодействия системы управления двигателем и управления дросселем (впрыском) для уменьшения крутящего момента при проскальзывании ведущего колеса. Другим примером функций, охватывающих более одного блока управления, является электронное управление коробкой передач, где легкость переключения передач может быть улучшена путем кратковременной регулировки опережения зажигания.
Если мы также рассмотрим будущие разработки, направленные на общую оптимизацию транспортных средств, то необходимо преодолеть ограничения, существующие в связи с обычными устройствами управления. Это можно сделать только путем объединения в сеть компонентов системы с использованием последовательной шины данных. Bosch разработал для этой цели систему «Controller Area Network» (CAN), которая с тех пор была стандартизирована на международном уровне (ISO 11898) и была «отлита в камне (в кремнии)» несколькими производителями полупроводников.
Используя CAN, одноранговые (одноуровневые) станции (контроллеры, датчики и исполнительные механизмы) подключаются через последовательную шину. Сама шина является симметричной или асимметричной двухпроводной цепью, которая может быть экранированной или неэкранированной. Электрические параметры физической передачи также указаны в стандарте ISO 11898. Подходящие чипы драйвера шины доступны от большого ряда производителей
Протокол CAN, соответствующий уровню канала передачи данных в эталонной модели ISO / OSI, удовлетворяет требованиям автомобильных для применения в автомобилях настоящего времени. В отличие от кабельных древовидных структур, сетевой протокол обнаруживает и исправляет ошибки передачи, вызванные электромагнитными помехами. Дополнительными преимуществами такой сети являются простота конфигурирования всей системы и возможность центральной диагностики.
Цель использования CAN в транспортных средствах заключается в том, чтобы любая станция могла взаимодействовать с любым другим, не налагая слишком большую нагрузку на компьютер контроллера.