Погрешность измерения
Содержание:
- Абсолютная погрешность — измерительный прибор
- Пределы
- Применение таблиц
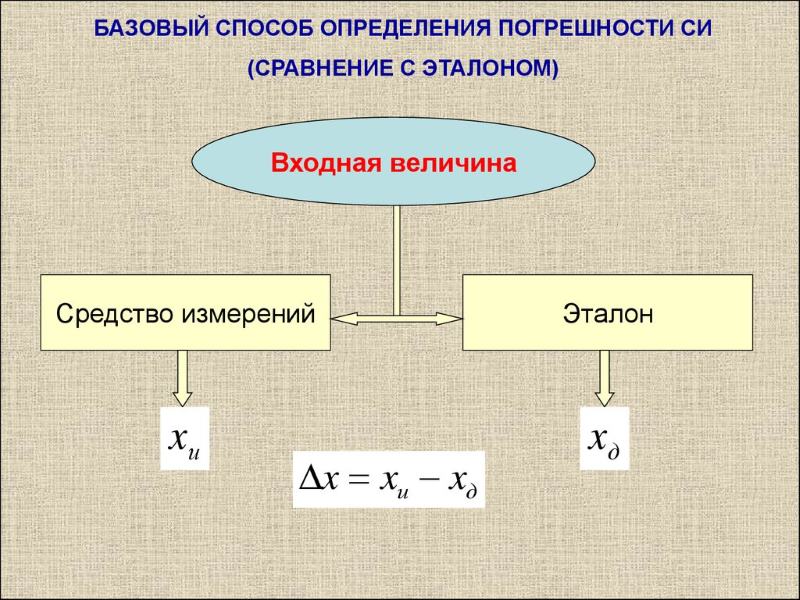
- Δа = | a изм – а ист | ед. изм. (4)
- Оценка погрешности при прямых измерениях
- Оценка погрешности при прямых измерениях
- Возможные источники систематических погрешностей
- Поверка приборов, для чего она нужна
- Примечания
- Погрешность измерения и принцип неопределенности Гейзенберга
- Что означает погрешность
- Какие классы точности бывают, как обозначаются
- Погрешности измерений, представление результатов эксперимента
Абсолютная погрешность — измерительный прибор
Абсолютная погрешность измерительного прибора представляет собой расхождение ( разность) между измеренным Ли и действительным ( истинным) Лд значениями измеряемой величины ДЛ — / 4н — Ац. Истинное значение измеряемой величины находят с учетом поправки. Поправка — это величина, обратная по знаку абсолютной погрешности: ДР — ДЛ Ал-А. Абсолютная погрешность электроизмерительных приборов со стрелочным показателем практически неизменна в пределах всей шкалы, поэтому с уменьшением значения измеряемой величины она возрастает. Для повышения точности измерения измеряемой величины на показывающих приборах со стрелочным указателем следует выбирать такие пределы измерения, чтобы отсчитывать показания примерно в пределах 2 / 3 всей шкалы.
Абсолютная погрешность измерительного прибора равна разности между показанием прибора и действительным ( точным) значением измеряемой величины.
Абсолютная погрешность измерительного прибора определяется разностью между показанием прибора и истинным значением измеряемой величины. Погрешность показаний прибора имеет своими источниками погрешности отдельных его элементов: чувствительного элемента, передаточного механизма и шкалы. Погрешность чувствительного элемента заключается в том, что действительная зависимость его перемещений от измеряемой величины не совпадает с расчетной, заложенной в схему прибора. Погрешность шкалы складывается из ошибки положения ее штрихов и эксцентриситета шкалы.
Абсолютной погрешностью измерительного прибора называется разность между его показанием и истинным значением измеряемой величины. Так как истинное значение измеряемой величины установить нельзя, в измерительной технике используется так называемое действительное значение, полученное с помощью образцового прибора.
Абсолютной погрешностью измерительного прибора называется разность между его показанием и истинным значением измеряемой величины. Поскольку последнее установить нельзя, то в измерительной технике используют так называемое действительное значение, полученное посредством образцового прибора.
Абсолютной погрешностью измерительного прибора называется разность между его показанием и истинным значением измеряемой величины Так как величину истинного значения измеряемой величины установить нельзя, в измерительной технике используется так называемое действительное значение, полученное с помощью образцового прибора.
Приведенная погрешность измерительного прибора — отношение абсолютной погрешности измерительного прибора к нормирующему значению, выраженное в процентах.
Корректность поставленных экспериментов доказана отсутствием превышения абсолютных ошибок измерения как при определении перемещений, так и напряжений над абсолютной погрешностью используемых измерительных приборов.
В некоторых случаях ( для образцовых и рабочих средств измерений повышенной точности) для исключения систематической погрешности показаний вводят поправку, равную абсолютной погрешности измерительного прибора.
Абсолютная погрешность измерительного прибора определяется разностью между показанием прибора и действительным значением измеряемой величины.
В данном разделе будут рассмотрены виды погрешностей, свойственные мерам, отдельным элементам и устройствам, а также средствам измерений в целом. Под абсолютной погрешностью меры понимают разность ( отклонение от номинального значения) между номинальным значением меры и истинным значением воспроизводимой ею величины. Так как истинное значение величины остается неизвестным, то на практике вместо него используют действительное значение величины. Следует различать абсолютную погрешность измерительного преобразователя по входу и по выходу. Абсолютную погрешность измерительного преобразователя по входу находят как разность между значением величины на входе преобразователя, определяемой в принципе по истинному значению величины на его выходе с помощью градуировочной характеристики, приписанной преобразователю, и истинным значением величины на входе преобразователя. Абсолютную погрешность измерительного преобразователя по выходу находят как разность между истинным значением величины на выходе преобразователя, отображающей измеряемую величину, и значением величины на выходе, определяемой в принципе по истинному значению величины на выходе с помощью градуировочной характеристики, приписанной преобразователю. Относительная погрешность измерительного прибора определяется как отношение абсолютной погрешности измерительного прибора к истинному значению измеряемой им величины.
Пределы
Как уже говорилось раньше, измерительный прибор, благодаря нормированию уже содержит случайную и систематические ошибки. Но стоит помнить, что они зависят от метода измерения, условий и других факторов. Чтобы значение величины, подлежащей замеру, было на 99% точным, средство измерения должно иметь минимальную неточность. Относительная должна быть примерно на треть или четверть меньше погрешности измерений.
Базовый способ определения погрешности
При установке класса точности в первую очередь нормированию подлежат пределы допустимой основной погрешности, а пределы допускаемой дополнительной погрешности имеют кратное значение от основной. Их пределы выражают в форме абсолютной, относительной и приведенной.
Приведенная погрешность средства измерения – это относительная, выраженная отношением предельно-допустимой абсолютной погрешности к нормирующему показателю. Абсолютная может быть выражена в виде числа или двучлена.
Если класс точности СИ будет определяться через абсолютную, то его обозначают римскими цифрами или буквами латиницы. Чем ближе буква будет к началу алфавита, тем меньше допускаемая абсолютная погрешность такого аппарата.
Класс точности 2,5
Благодаря относительной погрешности можно назначить класс точности двумя способами. В первом случае на шкале будет изображена арабская цифра в кружке, во втором случае дробью, числитель и знаменатель которой сообщают диапазон неточностей.
Основная погрешность может быть только в идеальных лабораторных условиях. В жизни приходится умножать данные на ряд специальных коэффициентов.
Дополнительная случается в результате изменений величин, которые каким-либо образом влияют на измерения (например температура или влажность). Выход за установленные пределы можно выявить, если сложить все дополнительные погрешности.
Случайные ошибки имеют непредсказуемые значения в результате того, что факторы, оказывающие на них влияние постоянно меняются во времени. Для их учета пользуются теорией вероятности из высшей математики и ведут записи происходивших раньше случаев.
Пример расчета погрешности
Статистическая измерительного средства учитывается при измерении какой-либо константы или же редко подверженной изменениям величины.
Динамическая учитывается при замерах величин, которые часто меняют свои значения за небольшой отрезок времени.
Применение таблиц
Воспользуемся стандартной таблицей. Погрешность весов зависит от того, какую массу положили на весы. Чем она больше, тем, соответственно, больше и погрешность.
Даже если положить очень легкое тело, погрешность будет. Этот связано с процессом трения, происходящим в осях.
Вторая таблица относится к набору гирь. На ней указано, что каждая из них имеет свою погрешность массы. 10-граммовая имеет погрешность в 1 мг, как и 20-граммовая. Просчитаем сумму погрешностей каждой из этих гирек, взятой из таблицы.

Удобно писать массу и погрешность массы в двух строчках, которые расположены одна под другой. Чем меньше гири, тем точнее измерение.
Δа = | a изм – а ист | ед. изм. (4)
Это
размерная, положительная величина, характеризующая отклонение измеренного от
истинного значений.
Относительная погрешность – это
отношение абсолютной погрешности к истинному значению измеряемой величины.
 (5)
(5)
Относительная
погрешность (5) – безразмерная величина, она измеряется в долях или процентах и
показывает какую часть от истинного значения измеряемой величины составляет
погрешность.
На
практике вместо неизвестного истинного значения используют среднее значение
измеряемой величины.
Формула (5) позволяет по
известной одной из характеристик определить другую. Часто вначале удобнее найти
относительную, а через неё абсолютную.
.
Если
измерение выполнено и погрешности определены, то окончательный результат
записывается в виде
 . (6)
. (6)
что эквивалентно заданию
интервала, в котором лежит истинное значение искомой величины. И чем уже данный
интервал, тем точнее измерения и наоборот.
4.
Вычисление погрешностей.
За
абсолютную погрешность однократно измеряемой величины применяют приборную
погрешность.
Для
простых измерительных и цифровых приборов приборная погрешностьравная
половине цены деления прибора.
. (7)
Например:
приборная погрешность
миллиметровой линейки (с=1 мм/дел) равна, Δапр
= 0,5 мм.
штангенциркуля (с=0,05 мм/дел) – Δапр
= 0,025 мм.
эл.
секундомера (с=0,001 с/дел) – Δапр
= 0,0005 с.
Для
стрелочных электроизмерительных приборов приборная погрешность определятся
через класс точности прибора (характеристика прибора указанная на его
шкале).
,
(8)
представляющая
собой отношение приборной погрешности к максимальному значению измеряемой
прибором величины. Из (8) для приборной погрешности стрелочных
электроизмерительных приборов получаем:
ΔАприб. = 0,01 · К · Аmax
.
(9)
Часто
в расчетах приходится использовать физические и математические постоянные,
которые как правило выражаются сложными десятичными дробями
(π=
3.141593… , е = 2.718282… , с = 2.99792… · 108 м/с
qe =
1,60219… · 10-19 Kл , mе =
1.67265… · 10-31к2 и т.д.).
При
использовании постоянных мы вынуждены их округлять т.е. брать приближённые
значения, это также даёт вклад в погрешность. К погрешностям табличных величин
относятся так же как и к приборным.
За
погрешность табличной величины принимают половину единицы последнего разряда
табличной величины, выбранной с заданной точностью.
Например; при определении
плотности тела цилиндрической формы необходимо использовать число π.
Предварительно оговаривается точность расчётов (например вычисления проводят с
точностью до
четырёх значащих цифр).
Тогда используемое число π и погрешность Δπ соответственно будут равны:
π =
3.142, Δπ = 0.0005
и окончательная запись числа
π с погрешностью имеет вид:

б)
Погрешности многократно измеряемых величин.
Погрешности
многократных измерений в рамках линейной теории оцениваются по следующей схеме
Оценка погрешности при прямых измерениях
При прямых измерениях искомая величина определяется непосредственно по отсчетному устройству (шкале) средства измерения. В общем случае измерения проводятся по определённому методу и при помощи некоторых средств измерений. Эти компоненты несовершенны и вносят свой вклад в погрешность измерения. Если тем или иным путём погрешность измерения (с конкретным знаком) удаётся найти, то она представляет собой поправку, которую просто исключают из результата. Однако достичь абсолютно точного результата измерения невозможно, и всегда остаётся некоторая «неопределённость», которую можно обозначить оценив границы погрешности. В России методики оценки погрешности при прямых измерениях стандартизированы ГОСТ Р 8.736-2011 и Р 50.2.038-2004.
В зависимости от имеющихся исходных данных и свойств оцениваемых погрешностей используют различные способы оценки. Случайная погрешность, как правило, подчиняется закону нормального распределения для описания которого необходимо указать математическое ожидание M{\displaystyle M} и среднеквадратическое отклонение σ.{\displaystyle \sigma .} В связи с тем, что при измерении проводится ограниченное число наблюдений, находят только наилучшие оценки этих величин: среднее арифметическое результатов наблюдений x¯{\displaystyle {\bar {x}}} и среднеквадратическое отклонение среднего арифметического Sx¯{\displaystyle S_{\bar {x}}}:
x¯=∑i=1nxin{\displaystyle {\bar {x}}={\frac {\sum _{i=1}^{n}x_{i}}{n}}}; Sx¯=∑i=1n(xi−x¯)2n(n−1).{\displaystyle S_{\bar {x}}={\sqrt {\frac {\sum _{i=1}^{n}(x_{i}-{\bar {x}})^{2}}{n(n-1)}}}.}
Доверительные границы ε{\displaystyle \varepsilon } полученной таким образом оценки погрешности определяются умножением среднеквадратического отклонения на коэффициент Стьюдента t,{\displaystyle t,} выбранный для заданной доверительной вероятности P{\displaystyle P:}
- ε=tSx¯.{\displaystyle \varepsilon =tS_{\bar {x}}.}
Систематические погрешности в силу своего определения не могут быть оценены путем проведения многократных измерений. Для составляющих систематической погрешности, обусловленной несовершенством средств измерений, как правило известны только их границы, представленные, например, основной погрешностью средства измерения.
Итоговая оценка границ погрешности получается суммированием вышеприведённых «элементарных» составляющих, которые рассматриваются как случайные величины. Эта задача может быть математически решена при известных функциях распределений этих случайных величин. Однако, в случае систематической погрешности, такая функция как правило неизвестна и форму распределения этой погрешности задают как равномерную. Основная трудность заключается в необходимости построения многомерного закона распределения суммы погрешностей, что практически невозможно уже при 3—4 составляющих. Поэтому используются приближённые формулы.
Суммарную неисключённую систематическую погрешность, когда она состоит из нескольких m{\displaystyle m} компонентов, определяют по следующим формулам:
- Θ∑=±∑i=1m|Θi|{\displaystyle \Theta _{\sum }=\pm \sum _{i=1}^{m}\left|\Theta _{i}\right|} (если m<3{\displaystyle m<3});
- Θ∑(P)=±∑i=1mΘi2{\displaystyle \Theta _{\sum }(P)=\pm {\sqrt {\sum _{i=1}^{m}\Theta _{i}^{2}}}} (если m⩾3{\displaystyle m\geqslant 3}),
- где коэффициент k{\displaystyle k} для доверительной вероятности P=,95{\displaystyle P=0{,}95} равен 1,1.
Суммарная погрешность измерения, определяемая случайной и систематической составляющей, оценивается как:
- Δ=KSx¯2+Θ∑23{\displaystyle \Delta =K{\sqrt {S_{\bar {x}}^{2}+{\frac {\Theta _{\sum }^{2}}{3}}}}} или Δ=KSx¯2+(Θ∑(P)k3)2{\displaystyle \Delta =K{\sqrt {S_{\bar {x}}^{2}+\left({\frac {\Theta _{\sum }(P)}{k{\sqrt {3}}}}\right)^{2}}}},
- где K=ε+Θ∑Sx¯+Θ∑3{\displaystyle K={\frac {\varepsilon +\Theta _{\sum }}{S_{\bar {x}}+{\frac {\Theta _{\sum }}{\sqrt {3}}}}}} или K=ε+Θ∑(P)Sx¯+Θ∑(P)k3.{\displaystyle K={\frac {\varepsilon +\Theta _{\sum }(P)}{S_{\bar {x}}+{\frac {\Theta _{\sum }(P)}{k{\sqrt {3}}}}}}.}
Окончательный результат измерения записывается какA±Δ(P),{\displaystyle A\pm \Delta (P),} где A{\displaystyle A} — результат измерения (x¯,{\displaystyle {\bar {x}},}) Δ{\displaystyle \Delta } — доверительные границы суммарной погрешности, P{\displaystyle P} — доверительная вероятность.
Оценка погрешности при прямых измерениях
При прямых измерениях искомая величина определяется непосредственно по отсчетному устройству (шкале) средства измерения. В общем случае измерения проводятся по определённому методу и при помощи некоторых средств измерений. Эти компоненты несовершенны и вносят свой вклад в погрешность измерения. Если тем или иным путём погрешность измерения (с конкретным знаком) удаётся найти, то она представляет собой поправку, которую просто исключают из результата. Однако достичь абсолютно точного результата измерения невозможно, и всегда остаётся некоторая «неопределённость», которую можно обозначить оценив границы погрешности. В России методики оценки погрешности при прямых измерениях стандартизированы ГОСТ Р 8.736-2011 и Р 50.2.038-2004.
В зависимости от имеющихся исходных данных и свойств оцениваемых погрешностей используют различные способы оценки. Случайная погрешность, как правило, подчиняется закону нормального распределения для описания которого необходимо указать математическое ожидание M{\displaystyle M} и среднеквадратическое отклонение σ.{\displaystyle \sigma .} В связи с тем, что при измерении проводится ограниченное число наблюдений, находят только наилучшие оценки этих величин: среднее арифметическое результатов наблюдений x¯{\displaystyle {\bar {x}}} и среднеквадратическое отклонение среднего арифметического Sx¯{\displaystyle S_{\bar {x}}}:
x¯=∑i=1nxin{\displaystyle {\bar {x}}={\frac {\sum _{i=1}^{n}x_{i}}{n}}}; Sx¯=∑i=1n(xi−x¯)2n(n−1).{\displaystyle S_{\bar {x}}={\sqrt {\frac {\sum _{i=1}^{n}(x_{i}-{\bar {x}})^{2}}{n(n-1)}}}.}
Доверительные границы ε{\displaystyle \varepsilon } полученной таким образом оценки погрешности определяются умножением среднеквадратического отклонения на коэффициент Стьюдента t,{\displaystyle t,} выбранный для заданной доверительной вероятности P{\displaystyle P:}
- ε=tSx¯.{\displaystyle \varepsilon =tS_{\bar {x}}.}
Систематические погрешности в силу своего определения не могут быть оценены путем проведения многократных измерений. Для составляющих систематической погрешности, обусловленной несовершенством средств измерений, как правило известны только их границы, представленные, например, основной погрешностью средства измерения.
Итоговая оценка границ погрешности получается суммированием вышеприведённых «элементарных» составляющих, которые рассматриваются как случайные величины. Эта задача может быть математически решена при известных функциях распределений этих случайных величин. Однако, в случае систематической погрешности, такая функция как правило неизвестна и форму распределения этой погрешности задают как равномерную. Основная трудность заключается в необходимости построения многомерного закона распределения суммы погрешностей, что практически невозможно уже при 3—4 составляющих. Поэтому используются приближённые формулы.
Суммарную неисключённую систематическую погрешность, когда она состоит из нескольких m{\displaystyle m} компонентов, определяют по следующим формулам:
- Θ∑=±∑i=1m|Θi|{\displaystyle \Theta _{\sum }=\pm \sum _{i=1}^{m}\left|\Theta _{i}\right|} (если m<3{\displaystyle m<3});
- Θ∑(P)=±∑i=1mΘi2{\displaystyle \Theta _{\sum }(P)=\pm {\sqrt {\sum _{i=1}^{m}\Theta _{i}^{2}}}} (если m⩾3{\displaystyle m\geqslant 3}),
- где коэффициент k{\displaystyle k} для доверительной вероятности P=,95{\displaystyle P=0{,}95} равен 1,1.
Суммарная погрешность измерения, определяемая случайной и систематической составляющей, оценивается как:
- Δ=KSx¯2+Θ∑23{\displaystyle \Delta =K{\sqrt {S_{\bar {x}}^{2}+{\frac {\Theta _{\sum }^{2}}{3}}}}} или Δ=KSx¯2+(Θ∑(P)k3)2{\displaystyle \Delta =K{\sqrt {S_{\bar {x}}^{2}+\left({\frac {\Theta _{\sum }(P)}{k{\sqrt {3}}}}\right)^{2}}}},
- где K=ε+Θ∑Sx¯+Θ∑3{\displaystyle K={\frac {\varepsilon +\Theta _{\sum }}{S_{\bar {x}}+{\frac {\Theta _{\sum }}{\sqrt {3}}}}}} или K=ε+Θ∑(P)Sx¯+Θ∑(P)k3.{\displaystyle K={\frac {\varepsilon +\Theta _{\sum }(P)}{S_{\bar {x}}+{\frac {\Theta _{\sum }(P)}{k{\sqrt {3}}}}}}.}
Окончательный результат измерения записывается какA±Δ(P),{\displaystyle A\pm \Delta (P),} где A{\displaystyle A} — результат измерения (x¯,{\displaystyle {\bar {x}},}) Δ{\displaystyle \Delta } — доверительные границы суммарной погрешности, P{\displaystyle P} — доверительная вероятность.
Возможные источники систематических погрешностей
Современный коллайдерный эксперимент очень сложен. В нём есть место огромному количеству источников систематических погрешностей на самых разных стадиях получения экспериментального результата. Вот некоторые из них.
Погрешности могут возникать на уровне «железа», при получении сырых данных:
- дефектные или неработающие отдельные регистрирующие компоненты или считывающие элементы. В детекторе миллионы отдельных компонентов, и даже если 1% из них оказался дефектным, это может ухудшить «зоркость» детектора и четкость регистрации сигналов. Надо подчеркнуть, что, даже если при запуске детектор работает на все 100%, постоянное детектирование частиц (это же жесткая радиация!) с течением времени выводит из строя отдельные компоненты, так что следить за поведением детектора абсолютно необходимо;
- наличие «слепых зон» детектора; например, если частица вылетает близко к оси пучков, то она улетит в трубу и детектор ее просто не заметит.
Погрешности могут возникать на этапе распознавания сырых данных и их превращение в физическое событие:
- погрешность при измерении энергии частиц в ;
- погрешность при измерении траектории частиц в , из-за которой неточно измеряется точка вылета и импульс частицы;
- неправильная идентификация типа частицы (например, система неудачно распознала след от π-мезона и приняла его за K-мезон). Более тонкий вариант: неправильное объединение адронов в одну адронную струю и неправильная оценка ее энергии;
- неправильный подсчет числа частиц (две частицы случайно вылетели так близко друг к другу, что детектор «увидел» только один след и посчитал их за одну).
Наконец, новые систематические погрешности добавляются на этапе позднего анализа события:
- неточность в измерении светимости пучков, которая влияет на пересчет числа событий в сечение процесса;
- наличие посторонних процессов рождения частиц, которые отличаются с физической точки зрения, но, к сожалению, выглядят для детектора одинаковыми. Такие процессы порождают неустранимый фон, который часто мешает разглядеть искомый эффект;
- необходимость моделировать процессы (в особенности, адронизацию, превращение кварков в адроны), опираясь частично на теорию, частично на прошлые эксперименты. Несовершенство того и другого привносит неточности и в новый экспериментальный результат. По этой причине теоретическую погрешность тоже часто относят к систематике.
В отдельных случаях встречаются источники систематических погрешностей, которые умудряются попасть сразу во все категории, они совмещают в себе и свойства детекторного «железа», и методы обработки и интерпретации данных. Например, если вы хотите сравнить друг с другом количество рожденных частиц и античастиц какого-то сорта (например, мюонов и антимюонов), то вам не стоит забывать, что ваш детектор состоит из вещества, а не из антивещества! Этот «перекос» в сторону вещества может привести к тому, что детектор будет видеть мюонов меньше, чем антимюонов, подробности см. в заметке Немножко про CP-нарушение, или Как жаль, что у нас нет детекторов из антивещества!.
Всю эту прорву источников потенциальных проблем надо распознать и оценить их влияние на выполняемый анализ
Здесь никаких абсолютно универсальных алгоритмов нет; исследователь должен сам понять, на какие погрешности надо обращать внимание и как грамотно их оценить. Конечно, тут на помощь приходят разные калибровочные измерения, выполненные в первые год-два работы детектора, и программы моделирования, которые позволяют виртуально протестировать поведение детектора в тех или иных условиях
Но главным в этом искусстве всё же является физическое чутье экспериментатора, его квалификация и накопленный опыт.
Поверка приборов, для чего она нужна
Все измерительные приборы измеряют с некой погрешностью, класс точности говорит лишь о том, в каком диапазоне она находится. Бывают случаи, когда диапазон погрешности незаметно увеличивается, и мы начинаем замечать, что измеритель «по-простому» начинает врать. В таких случаях помогает поверка.
Это процесс измерения эталонной величины в идеальных условиях прибором, обычно проводится метрологической службой или в метрологическом отделе предприятия производителя.
Существует первичная и периодическая, первичную проверку проводят после выпуска изделия и выдают сертификат, периодическую проводят не реже чем раз в год, для ответственных приборов чаще.
Поэтому если вы сомневаетесь в правильности работы устройства, вам следует провести его поверку в ближайшей метрологической службе, потому что измеритель может врать как в меньшую, так и в большую сторону.
Как легко проверить потребление электроэнергии в квартире, можете узнать в нашей статье.
Примечания
- ↑
- ↑ , с. 42.
- , с. 41.
- ↑ , с. 43.
- , p. 19.
- , p. 22.
- ↑ ГОСТ Р 8.736-2011 ГСИ. Измерения прямые многократные. Методы обработки результатов измерений. Основные положения / ВНИИМ. — 2011.
- , p. 61.
- , с. 82.
- , p. 90.
- , p. 91.
- , p. 88.
- , p. 112.
- МИ 1317-2004 ГСИ. Рекомендация. Результаты и характеристики погрешности измерений. Формы представления. Способы использования при испытаниях образцов продукции и контроле их параметров / ВНИИМС. — Москва, 2004. — 53 с.
- Р 50.2.038-2004 Измерения прямые однократные. Оценивание погрешностей и неопределенности результата измерений / ВНИИМ. — 2011. — 11 с.
- ↑ МИ 2083-90 ГСИ. Измерения косвенные определение результатов измерений и оценивание их погрешностей / ВНИИМ. — 11 с.
- , с. 129.
Погрешность измерения и принцип неопределенности Гейзенберга
Принцип неопределенности Гейзенберга устанавливает предел точности одновременного определения пары наблюдаемых физических величин, характеризующих квантовую систему, описываемых некоммутирующими операторами (например, координаты и импульса, тока и напряжения, электрического и магнитного поля). Таким образом, из аксиом квантовой механики следует принципиальная невозможность одновременного определения с абсолютной точностью некоторых физических величин. Этот факт накладывает серьёзные ограничения на применимость понятия «истинное значение физической величины»[источник не указан 233 дня].
Что означает погрешность
Стандартный вид записи измеренной величины с погрешностью знаком всем. Например, результат взвешивания какого-то предмета может быть 100 ± 5 грамм. Это означает, что мы не знаем абсолютно точно массу, она может быть и 101 грамм, и 96 грамм, а может быть и все 108 грамм. Но уж точно не 60 и не 160 грамм. Мы говорим лишь, сколько нам показывают весы, и из каких-то соображений определяем тот примерный разброс, который измерение вполне могло бы дать.
Тут надо подчеркнуть две вещи. Во-первых, в бытовой ситуации значение 100 ± 5 грамм часто интерпретируется так, словно истинная масса гарантированно лежит в этом диапазоне и ни в коей мере не может быть 94 или 106 грамм. Научная запись подразумевает не это. Она означает, что истинная масса скорее всего лежит в этом интервале, но в принципе может случиться и так, что она немножко выходит за его пределы. Это становится наиболее четко, когда речь идет о статистических погрешностях; см. подробности на страничке Что такое «сигма»?.
Во-вторых, надо четко понимать, что погрешности — это не ошибки эксперимента. Наоборот, они являются показателем качества эксперимента. Погрешности характеризуют объективный уровень несовершенства прибора или неидеальности методики обработки. Их нельзя полностью устранить, но зато можно сказать, в каких рамках результату можно доверять.
Некоторые дополнительные тонкости, связанные с тем, что именно означают погрешности, описаны на странице Тонкости анализа данных.
Какие классы точности бывают, как обозначаются
Как мы уже успели выяснить, интервал погрешности определяется классом точности. Данная величина рассчитывается, устанавливается ГОСТом и техническими условиями. В зависимости от заданной погрешность, бывает: абсолютная, приведенная, относительная, см. таблицу ниже
Согласно ГОСТ 8.401-80 в системе СИ классы точности обычно помечается латинской буквой, часто с добавлением индекса, отмеченного цифрой. Чем меньше погрешность, соответственно, меньше цифра и буквенное значение выше по алфавиту, тем более высокая точность.
Приборы, способные выполнять множество различных замеров, могут быть одновременно более двух классов.
Класс точности обозначается на корпусе устройства в виде числа обведенного в кружок, обозначает диапазон погрешностей измерений в процентах. Например, цифра ② означает относительную погрешность ±2%. Если рядом со знаком присутствует значок в виде галочки, это значит, что длина шкалы используется в качестве вспомогательного определения погрешности.
- 0,1, 0,2 – считается самым высоким классом
- 0,5, 1 – чаще применяется для устройств средней ценовой категории, например, бытовых
- 1,5, 2,5 – используется для приборов измерения с низкой точностью или индикаторов, аналоговых датчиков
Примечание. На корпусе высокоточных измерителей, класс может не наносится. Обозначение таких устройств как правило выполняется особыми знаками.
Погрешности измерений, представление результатов эксперимента
п.1. Шкала измерительного прибора
Примеры шкал различных приборов:
|
Манометр – прибор для измерения давления, круговая шкала |
Вольтметр – прибор для измерения напряжения, дуговая шкала |
Индикатор громкости звука, линейная шкала |
п.2. Цена деления
Пример определения цены деления:
| Определим цену деления основной шкалы секундомера.Два ближайших пронумерованных деления на основной шкале: a = 5 cb = 10 c Между ними находится 4 средних деления, а между каждыми средними делениями еще 4 мелких. Итого: 4+4·5=24 деления. |
Цена деления: \begin \triangle=\frac\\ \triangle=\frac=\frac15=0,2\ c \end