Шина (компьютер)
Содержание:
- Безопасность и ролевая модель
- Трансформация данных
- Продукт «Интеграционная шина»
- Взаимодействие с продуктами на платформе «1С:Предприятие 8»
- Централизованное управление
- Что такое CAN шина и принцип работы
- 2 Системныеблоки корпуса персональных компьютеров
- Промышленные применения сети CAN
- Шина данных и Apache Kafka: рекомендации и антипаттерны
- Пример сценария интеграции
- Требования безопасности ПУЭ
- Подключение 1С:Предприятия к «Интеграционной шине»
- Необходимость последовательного соединения в автомобилях
- Система передачи данных по шине CAN
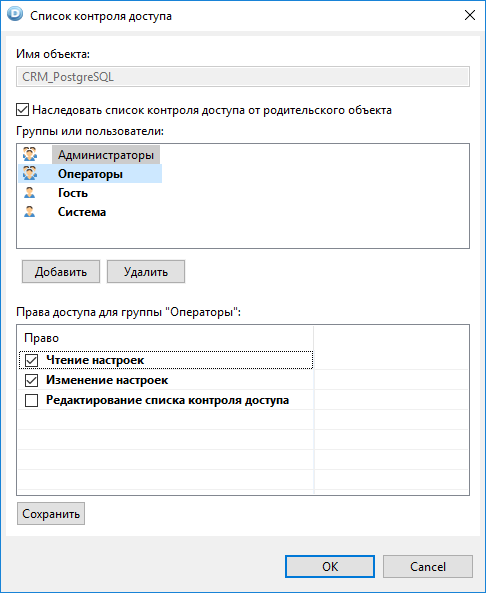
Безопасность и ролевая модель
Обеспечение безопасности при передаче данных традиционно недооценивается, а ведь в большинстве случаев утечки конфиденциальных данных происходят именно при их передаче.
Для обеспечения безопасности данных в DATAREON ESB поддерживается шифрование передаваемых данных с помощью алгоритмов шифрования AES, RC2 или TripleDES. Также поддерживается установка безопасного сетевого соединения по протоколу SSL или TLS.
Несмотря на то, что управление и настройка передачи данных для всей сети выполняется из единого инструмента управления, ответственность за работоспособность различных компонент может разделяться между пользователями. Разграничение прав доступа выполняется посредством ролевой модели. Уровень доступа пользователей может быть настроен в разрезе каждого объекта DATAREON ESB. Это позволяет разделять группы пользователей по зонам ответственности и ограничивать доступ к объектам DATAREON ESB согласно полномочиям.
Трансформация данных
Одной из проблем построения композитных приложений является различие интеграционных форматов и протоколов приложений, входящих в периметр интеграции. При этом довольно часты случаи, когда изменение форматов и протоколов невозможно из-за закрытости системы или отсутствия поддержки со стороны компании-разработчика. DATAREON ESB имеет в своем составе инструменты, позволяющие эффективно решать данную проблему. Эти инструменты предоставляют возможность настраивать правила трансформации в различные форматы с различными алгоритмами преобразования данных. Механизмы трансформации позволяют строить многошаговые алгоритмы преобразования данных с контролем различных условий, вплоть до написания кода на языках высокого уровня. Визуальные средства разработки снижают требования к специалистам, отвечающим за создание схем трансформации. Самые «ходовые» форматы – XML, JSON, DBF, CSV, Base64 – представлены в виде «мастеров» настройки. Возможно построение алгоритмов с обогащением данных (когда для определенных потребителей исходный пакет расширяется другими данными).
Продукт «Интеграционная шина»
- Обмен сообщениями. «Интеграционная шина» может подключаться к приложениям 1С начиная с версии платформы 1С:Предприятие 8.3.17. Также поддерживается обмен по протоколу AMQP и возможно подключение к внешним брокерам сообщений.
- Удаленный вызов API. Есть возможность выполнять HTTP запросы к внешним системам для получения или отправки данных, вызовов REST API или WEB-сервисов.
- Обмен файлами. Сообщения могут быть сохранены в файловой системе или на FTP-сервере. Также сообщения могут порождаться при изменении файлов в файловой системе или на FTP-ресурсах.
Для организации взаимодействия систем предлагается следующая последовательность:
- Разработчик описывает интеграцию систем в специализированном редакторе, используя простую графическую нотацию.
- Маршрут движения сообщений представляется направленным графом, который показывает, как сообщения передаются от источников к назначениям.
- При необходимости можно определить сложный алгоритм маршрутизации сообщений или трансформировать сообщение при помощи процедуры на встроенном языке.
- Источником сообщения может быть файл, результат HTTP запроса, внешний брокер сообщений или подключенная к «Интеграционной шине» внешняя система (такие системы называются участниками взаимодействия).
- Полученное описание сохраняется в специальном объекте Процесс интеграции.
- Определяются параметры Процесса интеграции, значения которых будут определены во время исполнения (пути, адреса сервисов и пр.).
- Созданные разработчиком Процессы интеграции разворачиваются на сервере «Интеграционной шины».
- Администратору сервера доступен графический интерфейс управления «Интеграционной шиной», в котором:
- Задаются значения дополнительным параметрам Процесса интеграции
- Определяются правила подключения Участников взаимодействия к серверу «Интеграционной шины» и способ их участия в процессах интеграции
- Запускаются Процессы интеграции и начинают доставлять сообщения
- Останавливаются Процессы интеграции
- Доступны данные мониторинга работы Процессов интеграции: количество обработанных сообщений, ошибок и пр.
При создании Процесса интеграции разработчик не должен знать точное число систем-участников интеграции. Вместо этого он оперирует понятием группа участников, которое объединяет произвольное количество участников, взаимодействующих с «Интеграционной шиной» единообразно. Во время исполнения администратор определяет, к каким группам относится конкретная система-участник, и для этого участника динамически выделяются необходимые ресурсы.
Взаимодействие с продуктами на платформе «1С:Предприятие 8»
Особое внимание DATAREON ESB уделяет программным продуктам, реализованным на платформе «1С:Предприятие 8». В поставку включена специальная подсистема, написанная на языке V8, которая встраивается в любую систему на платформе «1С:Предприятие» и обеспечивает все необходимые механизмы для интеграции решения с DATAREON ESB
DATAREON ESB предоставляет возможность централизованного автоматического встраивания и обновления данной подсистемы в конфигурации 1С без необходимости снятия их с поддержки.
Правила обработки данных для конфигураций на платформе «1С:Предприятие 8» создаются и хранятся централизовано в DATAREON ESB. Распространение и обновление обработчиков в системах на платформе «1С:Предприятие 8» также выполняется централизованно в автоматическом режиме без необходимости модификации самой конечной системы. Отсутствие необходимости модификации конечной системы при изменении схемы обмена является особенно важным, если таких систем много или если предъявляются высокие требования к времени доступности системы, которые значительно ограничивают временной промежуток, в который изменения могут быть внесены.
Реализованы удобные мастера, которые позволяют создавать обработчики для 1С:
В DATAREON ESB реализованы механизмы отладки обработчиков 1С без использования конфигуратора 1С. Отладка кода 1С выполняется непосредственно из центра управления DATAREON ESB.
Данный механизм позволяет проверить, каким образом будут выгружены или загружены данные в 1С без их сохранения в 1С и без прямого доступа к системе.
Все реализованные интеграционные сценарии учитывают особенности лицензионной политики фирмы «1С», в частности те, которые запрещают прямой доступ к данным системы на платформе 1С через СУБД.
Централизованное управление
Для выполнения задач централизованного управления интеграционным ландшафтом DATAREON ESB использует экосистему Eclipse. Использование Eclipse предоставляет пользователю широчайшие возможности по расширению доступного функционала DATAREON ESB. Центр Управления предоставляет мощные и удобные инструменты проектирования потоков данных, разработки алгоритмов трансформации, развитые средства администрирования и контроля.
Центр управления DATAREON ESB может быть интегрирован со средой разработки «1С:Enterprise Development Tools», также построенной на платформе Eclipse, что делает работу в DATAREON ESB еще более удобной для разработчиков на платформе «1С:Предприятие 8».
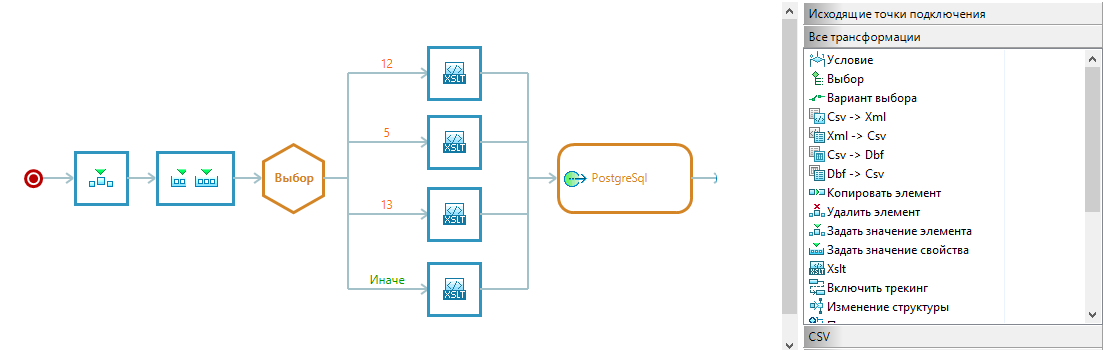
В DATAREON ESB присутствует множество визуальных инструментов настройки. Например, мастер настройки и управления информационными потоками:

Что такое CAN шина и принцип работы
Автомобильный электронный КАН модуль представляет собой сеть контроллеров, предназначенных для объединения всех управляющих блоков машины в одну сеть. Основная особенность заключается в том, что объединение элементов происходит с использованием одного проводника. Сам цифровой интерфейс на авто включает в себя пару кабелей, именуемых CAN. Информация, которая поступает по каналам от одного блока к другому, передается в зашифрованном виде.
Где находится устройство
Место установки CAN шины зависит от конкретной модели автомобиля, этот момент надо уточнять в сервисном руководстве к машине. Он может располагаться в моторном отсеке или в салоне, под панелью приборов. Подробно на фото показаны примеры расположения КАН интерфейсов.
Кан модуль в одном из жгутов со штатной проводкой Расположение шины в багажном отсеке Шина КАН под приборной панелью автомобиля
Обычно блок управления сигнализацией ставится под контрольным щитком либо за «приборкой» в салоне машины.
Функции
Функции, выполняющиеся интерфейсом КАН:
- возможность подключать к электросети транспортного средства и настраивать любые устройства, в том числе автосигнализации;
- более упрощенный алгоритм подключения и работы дополнительного оборудования и систем, установленных в автомобиле;
- возможность одновременной передачи и получения цифровой информации и ее анализа от различных источников;
- снижение величины воздействия внешних помех на работу основных и дополнительных систем;
- более быстрое подключение функции автозапуска противоугонной системы;
- ускорение процесса передачи данных к конкретным устройствам и механизмам машины.
Режимы
Цифровая система может функционировать в нескольких режимах:
- Автономный или фоновый. При его активации все системы выключены, но на КАН интерфейс подается питание. Значение напряжения достаточно низкое, поэтому такой режим работы не позволит разрядить АКБ.
- Режим пуска. Он работает, когда водитель устанавливает ключ в замок и прокручивает его в положение зажигания либо кликает по кнопке Старт/Стоп. Производится включение функции стабилизации питания. Напряжение начинает поступать на датчики и регуляторы.
- Активный режим функционирования. При его включении обмен информации начинает происходить между всеми датчиками и регуляторами. Когда активирован активный режим, значение потребления энергии может возрасти до 85 мА.
- Режим отключения либо засыпания. При остановке мотора все датчики и системы, подключенные к интерфейсу КАН, перестают работать. Производится их отключение от электросети машины.
Характеристики
Отдельно следует сказать об основных характеристиках скорости работы интерфейса:
- общая величина скорости передачи данных с информацией составляет 1 мб/с;
- при отправке информации между микропроцессорными устройствами этот показатель составит 500 кб/с;
- скорость получения данных к автомобильной системе «Комфорт» составляет 100 кб/с.
2 Системныеблоки корпуса персональных компьютеров
Системные
блоки IBM РС выполняются в различных
геометрических вариантах. Так по форме,
расположению внутренних узлов, рабочему
положению и размерам, обычно, выделяют
корпуса с вертикальным и горизонтальным
пространственным расположением элементов.
Корпуса с
горизонтальным расположением делят на типы:
нормальный (normal), малый (baby)
и сверх малый (slim)
Корпуса
с вертикальным расположением называют
типом башня (tower) и делят на виды: 1 – малый (mini
tower), 2 – средний (midi tower) и 3 – большой (big tower).
Как правило, корпуса такого исполнения
отличаются друг от друга видом передней
панели и общей полезной высотой, в то время
как, их ширина, длинна и глубина различаются
незначительно. На передней панели
системного блока располагаются некоторые
элементы управления, а именно: тумблер-выключатель
напряжения питания сети (Power), кнопка сброса
– перезагрузки (Reset), кнопка включения/выключения
режима турбирования (Turbo), индикаторы этих
режимов, индикатор обращения к жесткому
диску, передние панели дисковых и ленточных
устройств — накопителей информации со
сменными носителями и другие комплектующие
элементы и части устройств, требующие
простого и частого доступа при
использовании.
Внутри
системного блока размещаются основные
внутренние компоненты персонального
компьютера: материнская плата – 3, платы
адаптеров, интерфейсов, контроллеров
устройств, карт, расширений и их разъемы –
10, дисковые накопители – 8 и 13, блок питания
– 6, соединительные шлейфы, шнуры и кабели –
4, 7, вентилятор системы охлаждения
внутренних элементов – 1, вентилятор и
радиатор системы охлаждения центрального
процессора – 2, слоты системной шины – 9,
отверстие разъема клавиатуры – 11 и входной
и выходной разъемы подключения питания – 12
и т.д.. Так как многие компоненты могут быть
интегрированы на материнской плате, то не
все они могут быть представлены как
отдельные комплектующие элементы. Задняя
панель, как правило, содержит панели плат
расширений с разъемами, заглушки разъемов,
вентиляционное отверстие вентилятора
блока питания – 5 и др.
Корпус
может быть выполнен из металла, пластика и
комбинации того и другого. Как правило, все
комплектующие элементы, расположенные
внутри системного блока, крепятся изнутри к
металлической раме – 3, состоящей из днища
– 8, задней панели – 3 и передней панели – 7,
на которую затем надевается кожух – 2. В
передней панели имеется одно или несколько
окон – 1, предназначенных для вывода на
лицевую – переднюю часть управляющих
панелей устройств, требующих постоянного
доступа во время эксплуатации (магнитные,
оптические, магнитооптические дисководы,
ленточные накопители и др.). Задняя панель,
также, имеет отверстия и окна для вывода на
заднюю часть системы охлаждения блока
питания – 4, разъемов интерфейсов
периферийных устройств – 5, заглушек плат
интерфейсных карт – 6.
Промышленные применения сети CAN
Сравнение требований к шинным системам транспортных средств и системам промышленных полевых шин показывает удивительные сходства: низкая стоимость, работоспособность в жесткой электрической среде, высокие возможности в реальном времени и простота использования одинаково желательны в обоих секторах.
Стандартное использование CAN в «S-классе» Mercedes-Benz и принятие CAN коммерческими автопроизводителями США для быстрой передачи (до 1 Мбит / с) заставляли промышленных пользователей навострить уши. Не только производители мобильных и стационарных сельскохозяйственных и морских машин и оборудования выбрали CAN, но и выбор производителей медицинской аппаратуры, текстильных машин, а также специальной техники и элементов управления лифтами. Система последовательной шины особенно хорошо подходит для сетевых «интеллектуальных» устройств ввода-вывода, а также датчиков и исполнительных механизмов внутри машины или завода.
Промышленность текстильного машиностроения является одним из пионеров CAN. Один производитель оснастил свои ткацкие станки модульными системами управления, сообщающимися в режиме реального времени через сети CAN еще в 1990 году. Тем временем несколько производителей текстильных машин объединились в группу «CAN Textile Users Group», которая, в свою очередь, является членом международной группы пользователей и производителей «CAN in Automation». Аналогичные требования к текстильному оборудованию имеются в упаковочных машинах и машинах для производства и обработки бумаги.
В США ряд предприятий используют CAN в производственных линиях и станках в качестве внутренней системы шин для сетевых датчиков и исполнительных механизмов внутри линии или непосредственно машины. Некоторые пользователи, такие как сектор медицинской инженерии, решили в пользу CAN, поскольку у них были особенно строгие требования безопасности. С аналогичными проблемами сталкиваются и другие производители машин и оборудования с особыми требованиями в отношении безопасности (например, роботы и транспортные системы).
Помимо высокой надежности передачи, низкие затраты на соединение на станцию являются еще одним решающим аргументом для CAN
В приложениях, где цена имеет решающее значение, очень важно, чтобы чипы CAN были доступны от различных производителей. Компактность других чипов контроллера также является важным аргументом, например, в области низковольтных распределительных устройств.
Шина данных и Apache Kafka: рекомендации и антипаттерны
Подчеркнем, что при построении корпоративной шины данных не рекомендуется встраивать в нее логику интеграции или бизнес-логику, т.к. это приведет к исчезновению масштабируемости, гибкости и независимости от различных систем. В частности, используя экосистему Kafka для создания приложений с помощью Kafka Streams, KSQL или любого клиента Kafka (Java, .Net, Python или Go), не следует пытаться создать новую ESB на основе Kafka. Именно такая лишенная гибкости централизация считается антипаттерном для применения этой Big Data системы. Наоборот, нужно обеспечить всем компонентам Kafka гибко взаимодействовать с группами продуктов и сервисов .
Именно в таком ключе перед разработчиками компании Avito и была поставлена задача создания корпоративной шины данных (service data bus), реализацию которой мы рассмотрим далее. Этот кейс был наглядно представлен сотрудником компании Антоном Суховым на 5-м Backend-митапе Авито в декабре 2019 года .
Пример сценария интеграции
Офис отправляет в магазины и на сайт изменения в прайс-листе.
Схема содержит три группы участников: «Офисы», «МагазиныСоСтарымПО» и «МагазиныНа1С». В группе «МагазиныНа1С» объединены участники, которые используют для автоматизации системы на платформе 1С:Предприятие. В группе «МагазиныСоСтарымПО» собраны участники, которые используют ПО других производителей.
В момент изменения прайс-листа в офисе формируется сообщение, содержащее актуальный прайс-лист в формате EnterpriseData. Это сообщение отправляется в канал «ИзОфисов».
В узле «ДляВсех» все сообщения из канала «ИзОфисов» маршрутизируются по трем направлениям:
- Для передачи магазинам, использующим старое ПО, в формате JSON. Преобразование из исходного XML происходит в узле вида «Транслятор» с именем «JsonДляМагазинов». Полученный JSON отправляется в канал «ДляМагазиновСоСтарымПО».
- Для передачи магазинам, использующим ПО 1С, сообщение в исходном виде отправляется в канал «ДляМагазиновНа1С».
- Для публикации на сайте. Преобразование из исходного XML происходит в узле вида «Транслятор» с именем «JsonДляСайта». Полученный JSON отправляется на сайт HTTP запросом в узле «НаСайт».
При настройке такого процесса интеграции разработчику совершенно не важно, сколько магазинов каждого вида будет участвовать в интеграции.
Требования безопасности ПУЭ
Система электропитания в идеале составляется по схемам, которые рекомендованы правилами устройства электроустановок (ПУЭ). В жилое помещение или на отдельный объект подключается силовой кабель, а уже последующая его разводка внутри здания обеспечивается с помощью распределительного щитка. Для удобства такой разводки и применяется нулевая шина. Проще говоря, такое устройство представляет собой усиленный проводник в контактной зоне по открытому типу. К нему подключаются нулевые проводники при помощи винтовых соединителей.
Распространенная конструкция шины — брусок прямоугольной формы, произведенный из прочного металла с характерной проводимостью: латунь, сплавы с медью.
Использование общей нулевой шины для подключения нуля и заземления приведет к замыканию. Стоит понимать отличие между разделением и объединением по типу PE и N.
Подключение 1С:Предприятия к «Интеграционной шине»
Для поддержки асинхронного обмена сообщениями в платформе 1С:Предприятие версии 8.3.17 добавлен механизм сервисов интеграции. Обмен сообщениями происходит по каналам, организованным на сервере. Канал – это однонаправленный поток сообщений от отправителя к получателю. Сообщения в канал помещаются последовательно отправителем и последовательно доставляются получателю. Сообщения разных каналов обрабатываются и доставляются параллельно. Сообщение доставляется в шину только в том случае, если зафиксирована транзакция, в которой это сообщение отправлено.
- Сообщения, отправленные в один канал в определенной последовательности, будут получены в той же последовательности.
- Любые два сообщения, полученные из разных каналов в определенной последовательности, не обязательно будут обработаны в этой же последовательности, так как обработка сообщений из разных каналов может идти с разной скоростью.
Механизм сервисов интеграции в 1С:Предприятие не является альтернативной механизмам планов обмена, так как отвечает только за транспортировку сообщений, а не за формирование исходящих и интерпретацию входящих сообщений.
Взаимодействие с «Интеграционной шиной» выполняется с гарантированной доставкой сообщения, что означает:
- Отправляемое в «Интеграционную шину» сообщение сохраняется в информационной базе до тех пор, пока от «Интеграционной шины» не будет получено подтверждение того, что сообщение им получено.
- Система 1С:Предприятие будет выполнять попытки доставить сообщения «Интеграционной шине», пока не будет получено подтверждение получения сообщения или сообщение не устареет (у сообщения может быть установлен «срок годности»).
- При получении сообщения от «Интеграционной шины» это сообщение сохраняется в информационной базе, и только после этого «Интеграционной шине» подтверждается получение сообщения.
Необходимость последовательного соединения в автомобилях
Это следующая наша переводная статья из цикла посвященного шине CAN, которая еще чуть более подробно раскрывает то, как устроена и функционирует шина КАН. Англоязычный оригинал.
Предыдущую читайте здесь.
Многие автомобили уже имеют большое количество электронных систем управления. Рост автомобильной электроники является результатом отчасти стремления потребителя к большей безопасности и комфорту, а также отчасти требований правительства по улучшению контроля за выбросами и снижению расхода топлива. Управляющие устройства, отвечающие этим требованиям уже используются в течение некоторого времени в области управления двигателем, коробкой передач и дроссельной заслонкой, а также в антиблокировочных системах (ABS) и системе управления ускорением (ASC) .
Сложность функций, реализованных в этих системах, требует обмена данными между ними. В традиционных системах обмен данными осуществляется с помощью выделенных сигнальных линий, но это становится все труднее и дороже, так как функции управления становятся все более сложными. В случае сложных систем управления (таких как Motronic), в частности, количество соединений не может больше увеличиваться.
Кроме того, разрабатывается ряд систем, реализующих функции, охватывающие более одного управляющего устройства. Например, ASC требует взаимодействия системы управления двигателем и управления дросселем (впрыском) для уменьшения крутящего момента при проскальзывании ведущего колеса. Другим примером функций, охватывающих более одного блока управления, является электронное управление коробкой передач, где легкость переключения передач может быть улучшена путем кратковременной регулировки опережения зажигания.
Если мы также рассмотрим будущие разработки, направленные на общую оптимизацию транспортных средств, то необходимо преодолеть ограничения, существующие в связи с обычными устройствами управления. Это можно сделать только путем объединения в сеть компонентов системы с использованием последовательной шины данных. Bosch разработал для этой цели систему «Controller Area Network» (CAN), которая с тех пор была стандартизирована на международном уровне (ISO 11898) и была «отлита в камне (в кремнии)» несколькими производителями полупроводников.
Используя CAN, одноранговые (одноуровневые) станции (контроллеры, датчики и исполнительные механизмы) подключаются через последовательную шину. Сама шина является симметричной или асимметричной двухпроводной цепью, которая может быть экранированной или неэкранированной. Электрические параметры физической передачи также указаны в стандарте ISO 11898. Подходящие чипы драйвера шины доступны от большого ряда производителей
Протокол CAN, соответствующий уровню канала передачи данных в эталонной модели ISO / OSI, удовлетворяет требованиям автомобильных для применения в автомобилях настоящего времени. В отличие от кабельных древовидных структур, сетевой протокол обнаруживает и исправляет ошибки передачи, вызванные электромагнитными помехами. Дополнительными преимуществами такой сети являются простота конфигурирования всей системы и возможность центральной диагностики.
Цель использования CAN в транспортных средствах заключается в том, чтобы любая станция могла взаимодействовать с любым другим, не налагая слишком большую нагрузку на компьютер контроллера.
Система передачи данных по шине CAN
Логические состояния шин и шифрование
Для обмена данными шина CAN использует два состояния «доминантное» и «рецессивное», с помощью которых передаются информационные биты. Доминантное состояние соответствует «0», а рецессивное — «1». Для шифрования передачи используется процесс NRZ (без возврата на ноль), в котором нулевое состояние не всегда возвращается в промежуток между двумя одинаковыми состояниями передачи и, соответственно, необходимый для синхронизации временной интервал между двумя фронтами может оказаться слишком большим.
В основном используется двухпроводной кабель, в зависимости от окружающих условий, с витой или не витой парой. Две шинные линии называются CAN-H и CAN-L (рис. «Уровень напряжения передачи по CAN» ).
Двухпроводный кабель обеспечивает симметричную передачу данных, при которой биты передаются через обе шинные линии с использованием разных напряжений. Это уменьшает чувствительность к синфазным помехам, поскольку помехи влияют на обе линии и могут быть отфильтрованы путем создания разности (рис. «Фильтрация помех по шине CAN» ).
Однопроводный кабель представляет собой способ сокращения производственных затрат за счет экономии на втором кабеле. Однако общее подключение к массе, выполняющей функцию второго кабеля, должно быть доступно для этой цели всем пользователям шины. Поэтому однопроводный вариант шины CAN возможен только для системы связи с ограниченным монтажным пространством. Передача данных по однопроводному кабелю более чувствительна к излучаемым помехам — он не позволяет фильтровать импульсы помех так, как в двухпроводном кабеле. В результате на шинной линии требуется сигнал более высокого уровня. Это, в свою очередь, отрицательно сказывается на излучении помех. Поэтому необходимо снизить крутизну фронта импульсов сигналов шины по сравнению с двухпроводным кабелем. Это связано с уменьшением скорости передачи данных. По этой причине однопроводной кабель используется только для низкоскоростной шины CAN в области кузова и электроники для функций комфорта. Например, низкоскоростная шина CAN с двухпроводным кабелем в случае обрыва кабеля должна продолжать работать как однопроводная система. Однопроводное решение не описывается в спецификации CAN.
Уровни напряжения шины CAN
Высокоскоростные и низкоскоростные шины CAN используют разные уровни напряжения для передачи доминантных и рецессивных состояний. Уровни напряжения низкоскоростной шины CAN показаны на рис. а, «Уровень напряжения передачи по CAN», а высокоскоростной — на рис. Ь, «Уровень напряжения передачи по CAN».
Высокоскоростная шина CAN в рецессивном состоянии на обеих линиях использует номинальное напряжение 2,5 В. В доминантном состоянии на CAN-H и CAN-L подается номинальное напряжение 3,5 В и 1,5 В, соответственно. В низкоскоростной шине CAN в рецессивном состоянии на CAN-H подается напряжение 0 В (максимум 0,3 В), на CAN-L — 5 В (минимум 4,7 В). В доминантном состоянии на CAN-H напряжение составляет не менее 3,6 В, а на CAN-L не более 1,4 В.
Предельные значения
Для арбитражного метода в случае CAN важно, чтобы все узлы в сети видели биты идентификатора фрейма одновременно, чтобы узел, передавая бит, видел, передают ли их другие узлы. Задержки возникают из-за распространения сигнала в шине данных и обработки в трансивере
Таким образом, максимально допустимая скорость передачи данных зависит от общей длины шины. Стандарт ISO предусматривает скорость 1 Мбит/с для 40 м. У более длинных проводов возможная скорость передачи данных примерно обратно пропорциональна длине провода. Сети с дальностью 1 км могут работать со скоростью 40 кбит/с.