Устройство синхронного двигателя
Содержание:
- Особенности и применение разных видов электродвигателей
- Определение и принцип действия
- ПРЕИМУЩЕСТВА И НЕДОСТАТКИ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
- Полюсы обмоток двигателя
- Принцип действия и устройство электромашин разных типов
- Электродвигатели переменного тока
- Способы возбуждения синхронных генераторов
- Асинхронный электродвигатель
- РАЗНИЦА В ПРИМЕНЕНИИ
- Способы пуска и схемы подключения
- Асинхронные и синхронные двигатели
- Устройство
- Области применения, особые свойства и преимущества
Особенности и применение разных видов электродвигателей
У каждого типа двигателей есть достоинства и недостатки по сравнению с другими. Это определяет область их применения. Применение разных типов электромашин зависит от их особенностей конструкции и принципа действия.
Достоинства и использование асинхронных электродвигателей
Такие машины имеют достоинства перед синхронными аппаратами:
- простота конструкции и низкая цена; аппараты с фазным ротором позволяют регулировать скорость вращения и осуществлять плавный пуск без использования преобразователей частоты;
- большое разнообразие мощностей — от нескольких ватт до десятков киловатт.
Кроме достоинств есть недостатки:
- падение скорости вращения при росте нагрузки;
- более низкий КПД и большие габариты, чем у синхронных аппаратов той же мощности;
- кроме активной, такие аппараты потребляют реактивную (индуктивную) мощность, что ведёт к необходимости устанавливать компенсаторы или дополнительно оплачивать реактивную электроэнергию.
Используются такие машины практически везде, где необходимо приведение в движение механизма и есть трёхфазное напряжение 380 вольт.
Применение синхронных машин
- Регулировка путём изменения тока возбуждения cos φ. Это позволяет уменьшить ток потребления, габариты и сечение подводящего кабеля, а также увеличить КПД. Кроме того, такие аппараты используются в качестве компенсаторов реактивной мощности.
- Менее чувствительны к колебаниям напряжения и обладают большей перегрузочной способностью, особенно к ударным нагрузкам. Способность к превышению мощности повышается путём перевозбуждения обмоток ротора. Благодаря этому такие двигатели используются в экскаваторах, гильотинных ножницах и других подобных механизмах.
- Частота вращения не меняется при изменения нагрузки. Поэтому синхронные машины применяются в прецизионных станках в металлургии, машиностроении и деревообатывающей промышленности.
Существуют различные виды электродвигателей, и очень часто возникает вопрос, в чем же отличия между синхронным и асинхронным двигателем. В асинхронном обмотки, расположенные в статоре, создают вращающееся магнитное поле, взаимодействующее с токами, образующимися в роторе, благодаря чему он приходит во вращающееся состояние. Поэтому, в настоящее время, наиболее популярным считается простой и надежный асинхронный электродвигатель, имеющий короткозамкнутый ротор.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
ПРЕИМУЩЕСТВА И НЕДОСТАТКИ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
В сравнении с другими образцами машин переменного тока синхронные имеют следующие бесспорные преимущества:
- постоянство скорости вращения приводного вала при нагрузке, меняющейся в широких пределах;
- высокие показатели кпд и передачи полезной мощности в нагрузку;
- сравнительно низкий коэффициент реактивной составляющей;
- возможность длительной работы в режиме перегрузки;
- меньшая зависимость от колебаний напряжения в питающей сети.
Указанные преимущества и определяют области их применения: мощные вентиляционные системы, конвейерные линии, компрессоры и прокатные станы.
К числу существенных недостатков электродвигателей синхронного типа относят:
- сложность конструкции и сравнительно высокая стоимость;
- технические сложности с запуском электродвигателя в работу;
- потребность в дополнительном источнике постоянного напряжения;
- сложность управления основными параметрами двигателя (скоростью вращения и моментом на валу).
Все перечисленные недостатки синхронных машин переменного тока устраняются за счет использования дополнительных систем плавного запуска. Хорошего результата удается добиться, если для управления работой двигателя используются электронные устройства (частотные преобразователи).
Полюсы обмоток двигателя

В конструкции ротора имеются постоянные или электрические магниты. Их обычно называют полюсами. На синхронных машинах (двигателях и генераторах) индукторы могут быть двух типов:
- Явнополюсными.
- Неявнополюсными.
Они различаются между собой только взаимным расположением полюсов. Для уменьшения сопротивления со стороны магнитного поля, а также улучшения условий для проникновения потока, используются сердечники, изготовленные из ферромагнетиков.
Эти элементы располагаются как в роторе, так и в статоре. Для изготовления используются только сорта электротехнической стали. В ней очень много кремния. Это отличительная особенность такого вида металла. Это позволяет существенно уменьшить вихревые токи, повысить электрическое сопротивление сердечника.
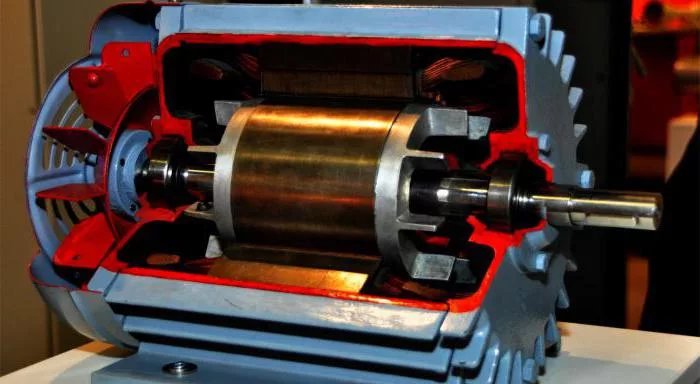
Принцип действия и устройство электромашин разных типов
Асинхронные и синхронные электродвигатели похожи по конструкции, но есть и отличия.
Устройство и принцип действия асинхронных электродвигателей
Это самые распространённые машины переменного тока. Такие электродвигатели состоят из трёх основных частей:
- Корпус с подшипниковыми щитами и лапами или фланцем.
- В корпусе находятся магнитопровод из железных пластин с обмотками. Этот магнитопровод носит название статор.
- Вал с подшипниками и магнитпроводом. Эта конструкция называется ротор . В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.
В пазах статора со сдвигом 120° намотаны три обмотки. При подключении к трёхфазной сети в статоре наводится вращающееся магнитное поле. Скорость вращения называется «синхронная скорость».
Справка! В однофазных электродвигателях вращающееся поле создаётся дополнительной обмоткой или конструктивными особенностями статора.
Это поле наводит ЭДС в роторе, возникающий при этом ток создаёт своё поле, взаимодействующее с полем статора и приводящее его в движение. Скорость вращения ротора меньше синхронной скорости. Эта разница называется скольжение.
Рассчитывается скольжение по формуле S=(n1-n2)/n1*100%, где: · n1 — синхронная скорость; · n2 — скорость вращения ротора.
Номинальная величи
на скольжения в обычных электромоторах 1-8%. При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.
В электродвигателях с фазным ротором вместо беличьей клетки в пазах ротора намотаны три обмотки. Через токосъёмные кольца и щётки они подключаются к добавочным сопротивлениям. Эти сопротивления ограничивают ток и магнитное поле в роторе. Это увеличивает скольжение и уменьшает скорость двигателя.
Такие аппараты используются при тяжёлом пуске и в устройствах с регулировкой скорости, например, в мостовых кранах.
Принцип действия синхронных электродвигателей
Эти двигатели устроены сложнее и дороже асинхронных машин. Их достоинство в постоянной скорости вращения, не меняющейся при нагрузке. Статор синхронной машины не отличается от асинхронной. Отличие в роторе. В отличие от асинхронного двигателя, вращение осуществляется за счёт взаимодействия вращающегося магнитного поля статора и постоянного поля ротора. Для его создания в роторе находятся электромагниты. Напряжение к катушкам подводится при помощи токосъёмных колец и графитных щёток.
Справка! В роторе синхронных машин малой мощности вместо электромагнитов установлены постоянные или просто магнитопровод имеет явновыраженные полюса. Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Электродвигатели переменного тока
Пользуются более высоким спросом, чем двигатели постоянного тока. Их часто используют в быту и в промышленности. Их производство намного дешевле, конструкция проще и надежнее, а эксплуатация достаточно проста. Практически вся домашняя бытовая техника оборудована электродвигателями переменного тока. Их используют в стиральных машинах, кухонных вытяжных устройствах и т.д. В крупной промышленности с их помощью приводится в движение станковое оборудование, лебедки для перемещения тяжелого груза, компрессоры, гидравлические и пневматические насосы и промышленные вентиляторы.
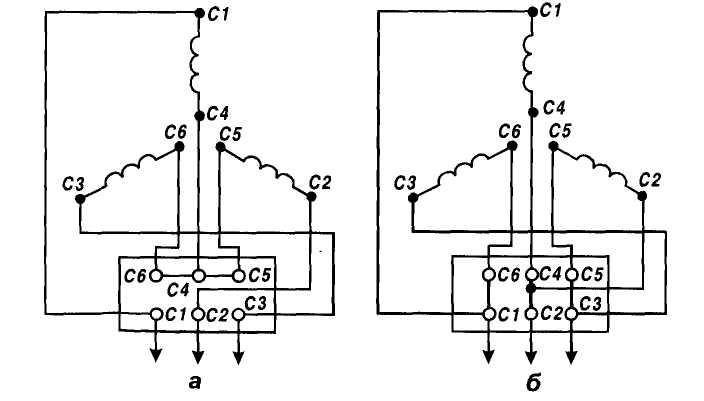
Способы возбуждения синхронных генераторов
Самым распространенным способом создания основного магнитного потока синхронных генераторов является электромагнитное возбуждение, состоящее в том, что на полюсах ротора располагают обмотку возбуждения, при прохождении по которой постоянного тока, возникает МДС, создающая в генераторе магнитное поле.
До последнего времени для питания обмотки возбуждения применялись преимущественно специальные генераторы постоянного тока независимого возбуждения, называемые возбудителями В (рис. 1.3, а). Обмотка возбуждения (ОВ) получает питание от другого генератора (параллельного возбуждения), называемого подвозбудителем (ПВ).
Ротор синхронного генератора, возбудителя и подвозбудителя располагаются на общем валу и вращаются одновременно. При этом ток в обмотку возбуждения синхронного генератора поступает через контактные кольца и щётки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителя r1 и подвозбудителя r2 .
В синхронных генераторах средней и большой мощности процесс регулирования тока возбуждения автоматизируют.
В синхронных генераторах получила применение также бесконтактная система электромагнитного возбуждения, при которой синхронный генератор не имеет контактных колец на роторе. В качестве возбудителя в этом случае применяют обращенный синхронный генератор переменного тока В (рис. 1.3, б). Трехфазная обмотка 2 возбудителя, в которой наводится переменная ЭДС, расположена на роторе и вращается вместе с обмоткой возбуждения синхронного генератора и их электрическое соединение осуществляется через вращающийся выпрямитель 3 непосредственно, без контактных колец и щёток. Питание постоянным током обмотки возбуждения 1 возбудителя В осуществляется от подвозбудителя ПВ – генератора постоянного
тока. Отсутствие скользящих контактов в цепи возбуждения синхронного генератора позволяет повысить её эксплуатационную надёжность и увеличить КПД.
В синхронных генераторах, в этом числе гидрогенераторах, получил распространение принцип самовозбуждения (рис. 1.4, а), когда
энергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающий
трансформатор и выпрямительный полупроводниковый преобразователь ПП преобразуется в энергию постоянного тока. Принцип самовозбуждения основан на том, что первоначальное возбуждение генератора происходит за счёт остаточного магнетизма машины.
На рис. 1.4, б представлена структурная схема автоматической системы самовозбуждения синхронного генератора (СГ) с выпрямительным трансформатором (ВТ) и тиристорным преобразователем (ТП), через которые электроэнергия переменного тока из цепи статора СГ после преобразования в постоянный ток подаётся в обмотку возбуждения. Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбуждения АРВ, на вход которого поступают сигналы напряжения на входе СГ (через трансформатор напряжения ТН) и тока нагрузки СГ (от трансформатора тока ТТ). Схема содержит блок защиты (БЗ), обеспечивающий защиту обмотки возбуждения (ОВ) от перенапряжения и токовой перегрузки.
Мощность, затрачиваемая на возбуждение, обычно составляет от 0,2 до 5 % полезной мощности (меньшее значение относится к генераторам большой мощности).
В генераторах малой мощности находит применение принцип возбуждения постоянными магнитами, расположенными на роторе машины. Такой способ возбуждения даёт возможность избавить генератор от обмотки возбуждения. В результате конструкция генератора существенно упрощается, становится более экономичной и надёжной. Однако, из-за высокой стоимости материалов для изготовления постоянных магнитов с большим запасом магнитной энергии и сложности их обработки применение возбуждения постоянными магнитами ограничено машинами мощностью не более нескольких киловатт.
Синхронные генераторы составляют основу электроэнергетики, так как практически вся электроэнергия во всём мире вырабатывается посредством синхронных турбо- или гидрогенераторов.
Так же синхронные генераторы находят широкое применение в составе стационарных и передвижных электроустановок или станций в комплекте с дизельными и бензиновыми двигателями.
Асинхронный электродвигатель
Асинхронный электродвигатель — основной привод, используемый в промышленности. К примеру, в автомобилестроении он используется в электроусилителях рулевого управления и в гибридных автомобилях. В следующем разделе представлена концепция работы асинхронного двигателя как индукционной машины. Приведен также энергетический анализ асинхронного двигателя в силу его явного преобладания среди приводов.
Устройство асинхронного электродвигателя
Различают двигатели с внешним ротором и внутренним ротором. У двигателей с внешним ротором статор находится внутри ротора, у двигателей с внутренним ротором наоборот — ротор находится внутри статора. На принципиальной схеме (рис. «Принцип работы асинхронного двигателя» ) показана принципиальная схема асинхронного двигателя с внутренним ротором.
Ротор состоит из короткозамкнутого каркаса с пакетом пластин (рис. «Короткозамкнутая клетка асинхронного электродвигателя» ), в качестве примера с четырьмя короткозамкнутыми стержнями). Пакет пластин полностью заполняет пространство короткозамкнутого каркаса (на рис. не показано). Он состоит из отдельных стальных листов, изолированных друг от друга, чтобы свести к минимуму потери вихревых токов.
Рабочие характеристики асинхронного электродвигателя
Обмотка статора создает вращающееся поле с трехфазным переменным током. Между скоростью вращающегося поля и скоростью ротора возникает разница, создающая индукцию магнитно-эффективного тока в роторе, которая в свою очередь способствует созданию крутящего момента.
Двухполосный короткозамкнутый ротор(osВЕ с
ΦEds = -d/dt∫∫BEdA (уравнение 12)
На основании этого уравнения и конструктивных переменных двигателя (см. рис. 13) получаем:
2E (l+2r) п = 2lr·ВЕ·ω sin(ωt) (уравнение 13)
где:
Е = I · Аnom/к (к — удельная электропроводность), напряжение создает магнитноэффективную мощность
i = (к·Аnomlr·ωs/(l+r))·sin(ωst) (уравнение 14)
в проводящем контуре, магнитное поле которого
Hind = i·N/lFe
и плотность потока (магнитная индукция)
Bind = μ·Hind
ослабляет исходное вращающееся поле ВЕ (индуктивное сопротивление). Нижеследующее уравнение применимо для получения результирующей магнитной индукции:
BR= BE-Bind
В уравнении Максвелла (уравнение 13) вместо ВЕ остается результирующая магнитная индукция BR. На проводящий контур воздействует тангенциальная сила Ft:
Ft = i l BR sin(ωst) (уравнение 15)
(сила Лоренца). Она используется для вычисления крутящего момента. Для уравнений 14 и 15 справедливо следующее:
M=2 Ft r = (2 k·Anom ωs/(l+r))·(lr·BR sin(ωst))2
Распределение крутящего момента асинхронного двигателя
При увеличении угловой частоты индуктивное сопротивление сначала приводит к увеличению крутящего момента вплоть до достижения переломного момента. Это максимально возможный крутящий момент двигателя. Впоследствии он падает из-за увеличивающегося влияния индуктивного сопротивления. Рассеяние мощности Рv, возникающее в проводящем контуре, вычисляется на основе сопротивления проводящего контура Rs и тока, наведенного в контуре is
Pv = Rs— is2
Таким образом, рассеяние мощности растет пропорционально квадрату наведенного тока.
Классы эффективности двигателей
СЕМЕР Европейский Комитет изготовителей электродвигателей и силовой электроники) ввел классификацию эффективности на базе трех классов (EFF1, EFF2 и EFF3). Классы эффективности применяются к трехфазным асинхронным двигателям с двумя и четырьмя полюсами, а также с выходной мощностью от 1,1 до 90 кВт (рис. «Эффективность и выходная мощность» ).
РАЗНИЦА В ПРИМЕНЕНИИ
Синхронные двигатели в отличии от асинхронных имеют более сложную конструкцию и высокую цену, но обладают улучшенными эксплуатационными характеристиками:
- частота вращения более стабильна и не имеет ярко выраженной зависимости от нагрузки на валу и уровня сетевого напряжения;
- более высокая перегрузочная способность;
- двигатели с автоматическим регулированием тока возбуждения способны поддерживать оптимальное напряжение в сети.
Асинхронные потребляют наряду с активной большой объём реактивной энергии, которая транспортируется по линиям вместе с активной составляющей, увеличивая потери.
В крупных узлах потребления это приводит к дефициту реактивной мощности и значительной посадке напряжения. В этом случае используют батареи конденсаторов или синхронные компенсаторы, вырабатывающие реактивную мощность.
Применение СД вместо АД решает эту проблему, так как синхронные двигатели могут работать в широком диапазоне значений cos φ, не только не потребляя реактивную мощность, но и отдавая её в электрическую сеть.
* * *
2014-2021 г.г. Все права защищены.Материалы сайта имеют ознакомительный характер и не могут использоваться в качестве руководящих и нормативных документов.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
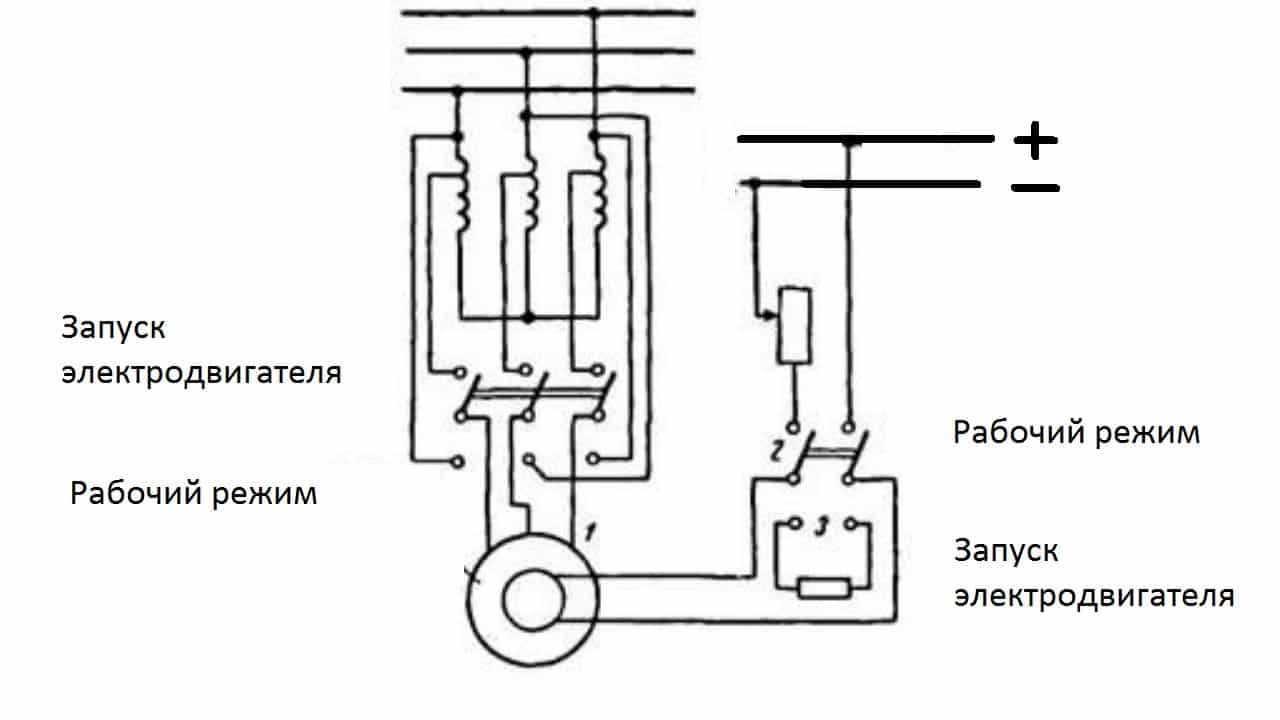
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
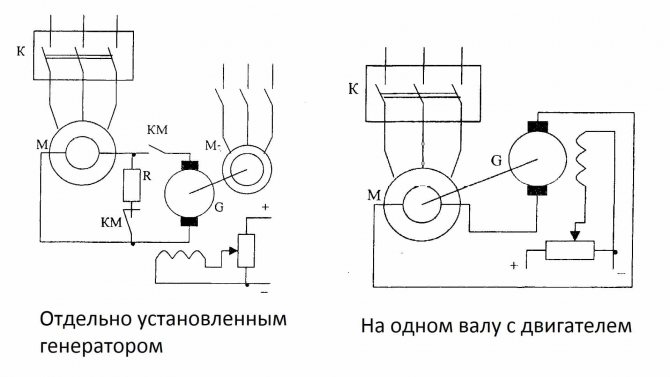
Рис. 9. Генераторный способ пуска синхронного двигателя
Как видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
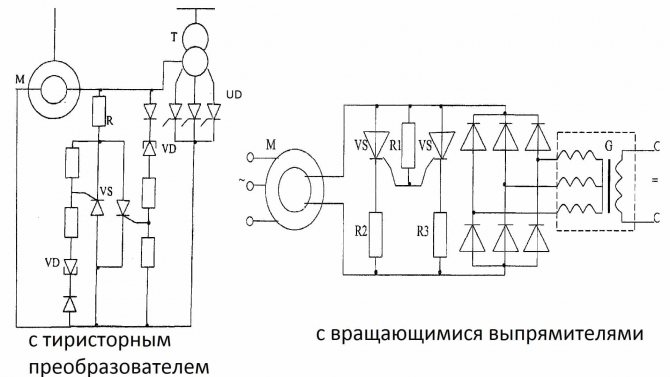
Рис. 10. Тиристорная схема пуска синхронного двигателя
В первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
Асинхронные и синхронные двигатели
Чтобы производственные механизмы работали с максимальной эффективностью, необходимо правильно подобрать электрический двигатель, который будет применяться в качестве привода. В этой статье мы рассмотрим, чем отличаются асинхронные и синхронные двигатели с точки зрения конструктивных особенностей, функциональности и экономичности.
Асинхронные и синхронные двигатели: устройство
Электрические двигатели представляют собой агрегаты для преобразования электроэнергии в энергию механическую. Основу конструкции двигателя (как синхронного, так и асинхронного типа) составляют следующие элементы:
- неподвижный (статор);
- вращающийся (ротор).
Статоры электродвигателей обеих категорий имеют схожий принцип устройства. В специальные пазы (осевые прорези) уложены токонесущие проводки из меди или алюминия. Функцией статора является создание вращающегося магнитного поля. Ротор (с обмоткой возбуждения) закреплен на валу двигателя и вращается под воздействием возникающей электродвижущей силы.
В чем ключевое отличие синхронного двигателя от асинхронного
Главное отличие синхронного от асинхронного двигателя заключается в устройстве ротора.
Роторы синхронных двигателей представляют собой постоянные или электрические магниты. Постоянное магнитное поле, создаваемое ими, взаимодействует с вращающимся магнитным полем статора.
В случае с асинхронным двигателем (который также называют индукционным) в пазы ротора вставляются короткозамкнутые металлические пластины. Кроме короткозамкнутой разновидности, применяются также фазные роторы, снабженные контактными кольцами, которые после разбега замыкаются накоротко.
В результате соотношение частоты оборотов двигателя, находящегося под нагрузкой, с частотой вращения, которая присуща магнитному полю статора, для разных типов двигателя следующее:
- равное для агрегатов синхронного типа;
- неравное для асинхронных двигателей (наблюдается постоянное отставание от скорости вращения магнитного поля статора, равное величине скольжения).
На основе понимания того, чем отличается асинхронный двигатель от синхронного, можно сформулировать главные преимущества и недостатки этих двигателей.
Сравнение разных типов двигателей
Двигатели синхронной разновидности сложнее в использовании, поскольку они:
- в отличие от асинхронных моделей нуждаются в дополнительном источнике постоянного тока;
- подвержены более быстрому износу деталей (по причине использования контактных колец со щетками);
- требуют применения вспомогательных механизмов для запуска (индукционный двигатель имеет собственный пусковой момент).
Для асинхронных моделей характерны:
- простота конструкции;
- надежность в эксплуатации.
При этом синхронные двигатели обладают более широкими возможностями с точки зрения коэффициента мощности, а также менее чувствительны к перепадам напряжения, но стоимость таких агрегатов выше, что делает их использование менее выгодным.
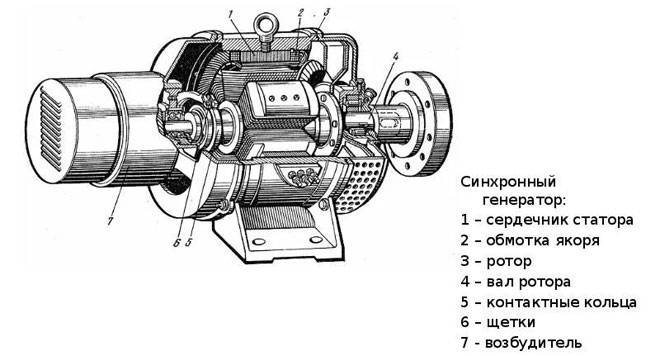
Устройство
Основными частями синхронной машины являются якорь и индуктор (обмотка возбуждения). Как правило, якорь располагается на статоре, а на отделённом от него воздушным зазором роторе находится индуктор — таким образом, по принципу действия синхронная машина представляет собой как бы «вывернутую наизнанку» машину постоянного тока, переменный ток для обмотки якоря которой не получается с помощью коллектора, а подводится извне.
Якорь представляет собой одну или несколько обмоток переменного тока. В двигателях токи, подаваемые в якорь, создают вращающееся магнитное поле, которое сцепляется с полем индуктора, и таким образом происходит преобразование энергии. Поле якоря оказывает воздействие на поле индуктора и называется поэтому также полем реакции якоря. В генераторах поле реакции якоря создаётся переменными токами, индуцируемыми в обмотке якоря от индуктора.
Индуктор состоит из полюсов — электромагнитов постоянного тока или постоянных магнитов (в микромашинах). Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что полюса ярко выражены и имеют конструкцию, схожую с полюсами машины постоянного тока. При не явнополюсной конструкции обмотка возбуждения укладывается в пазы сердечника индуктора, весьма похоже на обмотку роторов асинхронных машин , с той лишь разницей, что между полюсами оставляется место, не заполненное проводниками (так называемый большой зуб). Неявнополюсные конструкции применяются в быстроходных машинах, чтобы уменьшить механическую нагрузку на полюса.
Для уменьшения магнитного сопротивления, то есть для улучшения прохождения магнитного потока, применяются ферромагнитные сердечники ротора и статора. В основном они представляют собой шихтованную (набранную из отдельных листов) конструкцию из электротехнической стали.
Области применения, особые свойства и преимущества
Использовать как синхронный конденсатор
V-образная кривая синхронной машины
Изменяя возбуждение синхронного двигателя, он может работать с запаздывающим, опережающим и единичным коэффициентами мощности. Возбуждение, при котором коэффициент мощности равен единице, называется нормальное напряжение возбуждения. Величина тока при таком возбуждении минимальна. Напряжение возбуждения, превышающее нормальное возбуждение, называется повышенным напряжением возбуждения, напряжение возбуждения, меньшее, чем нормальное возбуждение, называется повышенным напряжением возбуждения. Когда двигатель чрезмерно возбужден, противо-ЭДС будет больше, чем напряжение на клеммах двигателя. Это вызывает эффект размагничивания из-за реакции якоря.
Кривая V синхронной машины показывает ток якоря как функцию тока возбуждения. С увеличением тока возбуждения ток якоря сначала уменьшается, затем достигает минимума, затем увеличивается. Точкой минимума также является точка, при которой коэффициент мощности равен единице.
Эта возможность выборочного управления коэффициентом мощности может быть использована для коррекция коэффициента мощности энергосистемы, к которой подключен двигатель. Поскольку большинство энергосистем любого значительного размера имеют чистый запаздывающий коэффициент мощности, присутствие перевозбужденных синхронных двигателей приближает полезный коэффициент мощности системы к единице, повышая эффективность. Такая коррекция коэффициента мощности обычно является побочным эффектом двигателей, уже присутствующих в системе, для обеспечения механической работы, хотя двигатели могут работать без механической нагрузки просто для обеспечения коррекции коэффициента мощности. На крупных промышленных предприятиях, таких как заводы, взаимодействие между синхронными двигателями и другими отстающими нагрузками может быть явным образом учтено в электрическом проекте предприятия.[нужна цитата]
Предел устойчивости установившегося состояния
- Т=ТМаксимумгрех(δ){ Displaystyle mathbf {T} = mathbf {T} _ { text {max}} sin ( delta)}
куда,
- Т{ displaystyle mathbf {T}} крутящий момент
- δ{ displaystyle delta} угол крутящего момента
- ТМаксимум{ displaystyle mathbf {T} _ { text {max}}} это максимальный крутящий момент
здесь,
- ТМаксимум=3VEИксsωs{ displaystyle mathbf {T} _ { text {max}} = { frac {{ mathbf {3}} { mathbf {V}} { mathbf {E}}} {{ mathbf {X_ { s}}} { omega _ {s}}}}}
При приложении нагрузки угол крутящего момента δ{ displaystyle delta} увеличивается. Когда δ{ displaystyle delta} = 90 ° крутящий момент будет максимальным. Если нагрузка приложена и дальше, двигатель потеряет синхронизм, поскольку крутящий момент двигателя будет меньше момента нагрузки. Максимальный момент нагрузки, который может быть приложен к двигателю без потери его синхронизма, называется пределом устойчивости синхронного двигателя в установившемся режиме.
Другой
Синхронные двигатели особенно полезны в приложениях, требующих точного управления скоростью и / или положением.
- Скорость не зависит от нагрузки во всем рабочем диапазоне двигателя.
- Скорость и положение можно точно контролировать с помощью элементов управления без обратной связи; например., шаговые двигатели.
- Приложения с низким энергопотреблением включают в себя позиционирующие машины, где требуется высокая точность, и робот приводы.
- Они сохранят свое положение, когда постоянный ток приложен как к статору, так и к обмоткам ротора.
- Часы, приводимые в действие синхронным двигателем, в принципе так же точны, как частота сети его источника питания. (Хотя небольшие отклонения частоты будут происходить в течение любых заданных нескольких часов, операторы сети активно регулируют частоту в сети в более поздние периоды для компенсации, тем самым поддерживая точность тактовых импульсов с приводом от двигателя; .)
- Повышенная эффективность в низкоскоростных приложениях (например, шаровые мельницы).